:quality(80)/p7i.vogel.de/wcms/17/91/17914750ffc7ba7a25184e575a16b673/adobestock-58742161--c2-a9-20doc-20rabe-20media-20-e2-80-93-20stock-adobe-com-6000x3377v1.jpeg "Wir haben Tipps & Tricks aus dem Bereich Digital Engineering gesammelt, um Konstrukteuren und Entwicklern die Arbeit zu erleichtern. (Bild: © DOC RABE Media – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/d1/aa/d1aa90fe57c7e869fad955f6fa5869a9/yamu-jay-green-energy-9062790-5376x3022v1.jpeg "Die neue Toolbox richtet sich an kleine und mittlere Unternehmen (KMU), Start-ups sowie an Entwicklungs- und Konstruktionsabteilungen, die zirkuläre Anforderungen systematisch in ihre Produkte integrieren möchten. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/99/3f/993f3507a25b1b01acdc1dfa064df03b/1-20--20spritzguss-c-uni-a-20grunwald-edit-4671x2627v1.jpeg "Nils Meyer (rechts) und Projekt-Mitarbeiter Julian Greif entwickeln ein KI-Tool, um die Bauteilentwicklung im Spritzguss zu optimieren. (Bild: Universität Augsburg)")
:quality(80)/p7i.vogel.de/wcms/65/44/65449128817fa1f9a15a6dcadb9d2a3e/adobestock-690807704--c2-a9-20krungchingpixs-20-e2-80-93-20stock-adobe-com-6718x3780v1.jpeg "Chatten reicht nicht: Industrielle KI muss Physik verstehen, um im Engineering-Alltag zu bestehen. (Bild: © krungchingpixs – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ca/52/ca52419eb80bccebeaf6fd29dd30717d/geralt-time-2676366-3226x1813v1.jpeg "Was ein Bauteil wirklich kostet, wissen viele Konstrukteure erst Wochen nach der Fertigung der Bauteile. Wie sich diese Lücke schließen lässt, erfahren Teilnehmer auf dem Konstruktionsleiter-Forum 2026. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/87/c2/87c2b4e3161b9d7ff5816852a1f05a64/0132403102v1v1.jpeg "(Bild: Vogel Professional Education)")
:quality(80)/p7i.vogel.de/wcms/c3/0d/c30daafe0cdf3fcc3d50509e60be8989/bild-1-925x520v1.jpeg "Für eine Förderstrecke für Mozzarella-Verpackungen verwendet Zott das Kettenfördersystem Varioflow Plus von Bosch Rexroth mit Komponenten aus Edelstahl. (Bild: Heldele Automation )")
:quality(80)/p7i.vogel.de/wcms/11/96/11960b1d2f221b89b8fe9bf1de6e367e/franke-drehverbindung-materialmix-frei-1920x1080v1.png "Mögliche Werkstoffe für die Lagergehäuse von Drahtwälzlagern (von links im Uhrzeigersinn): 3D-gedruckte Struktur, Karbon, Stahl, Kunststoff, Messing, Aluminium, Bronze, Edelstahl (Bild: Franke)")
:quality(80)/p7i.vogel.de/wcms/27/9b/279bdbe29d08f90d38d3f330a8544de0/rollon-hvc-mg-rgb-1616x908v1.jpeg "Die neue MG-Version der HVC-Kugelschienenführung mit Vollauszug hat eine höhere Tragzahl als die bisher verfügbaren Varianten der Baureihe. (Bild: Rollon)")
:quality(80)/p7i.vogel.de/wcms/d8/d4/d8d4786533658531dd7f5d383c020f54/-sb-3254-3000x1687v1.jpeg "Auch 2026 heißt es in Würzburg wieder „Herzlich willkommen\" für Konstruktions- und Entwicklungsleiter aus ganz Deutschland. (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/83/93/83935dca5289556988d7d2e9f2183d82/-sb-3254-3000x1687v1.jpeg "Würzburg im Oktober heißt: zwei Tage rund um die Frage, wie sich Produktentwicklung heute effizient und zukunftsfähig gestalten lässt. (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/e9/03/e90306f116f570daebed16b9684b9445/item-20fa-20schutzz-c3-a4une-20planen-20-bild2-1469x827v1.png "Digitale Konfiguratoren wie die von Item vereinfachen die Planung kompletter Schutzzäune über eine intuitive Benutzeroberfläche. (Bild: Item)")
:quality(80)/p7i.vogel.de/wcms/16/00/1600883e04215e4e3863e4a941e364c0/newsimage424941-2000x1124v1.jpeg "Mit Kassandra tauchen Teams in eine Thriller‑Story ein, lösen unter Zeitdruck KI‑Challenges. (Bild: Fraunhofer FIT)")
:quality(80)/p7i.vogel.de/wcms/1a/d9/1ad9efc8a86adc6031d22f7473e0d390/0132121730v1.jpeg "Nachdem es in den ersten vier Monaten 2026 für die deutsche Industrie in Sachen Auftragslage eher mau aussah, hat der Mai als Wonnemonat seinem Namen wohl Ehre gemacht. Analysten glauben nun zwar an mehr Sonne, doch die Wolken sind noch nicht verschwunden ... (Bild: Solarfans)")
:quality(80)/p7i.vogel.de/wcms/a0/03/a003d1d5ee83399f232303f7c50bd93b/geralt-statistics-4623842-4752x2672v1.jpeg "Erholung mit Risiken: Deutschlands Wirtschaft zwischen geopolitischer Unsicherheit und technologischem Aufschwung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/aa/e1/aae1d4890329b20e40f4ebbc782705c7/aussenhandel-saisonbereinigt-2048x1151v1.png "Im April 2026 sind die deutschen Exporte gegenüber März 2026 kalender- und saisonbereinigt um 0,9 Prozent und die Importe um 1,2 Prozent gestiegen. (Bild: Destatis)")
:quality(80)/p7i.vogel.de/wcms/76/32/763233e84c4054d0c8634dad6c6141fc/adobestock-2035398302-2730x1536v1.jpeg "Wir zeigen, wie aus mechanischen Fächern und maritimen Lüftungssystemen der moderne Hochleistungsventilator wurde. (Bild: © Olga Ко – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/09/2a/092ad24dd4b603abc12e017024d5be85/digitalerzwillingjoseph-von-fraunhofer-20-282-29-6200x3489v1.jpeg "Auf der Hannover Messe 2026 konnten sich Besucher mit dem digitalen Zwilling von Joseph von Fraunhofer unterhalten – das Metaverse und KI machen es möglich. (Bild: Fraunhofer-Gesellschaft)")
:quality(80)/p7i.vogel.de/wcms/2f/2b/2f2b46d8cd0987790d053a0ecc434833/aumovio-pp-dtco-1-1772x997v1.jpeg "20 Jahre digitaler Tachograph: Wie sich das Gerät vom Kontrollgerät zum Datenhub im Güterverkehr entwickelt hat. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/bf/45/bf4523ff21e3add62ccd8390c5bfea7a/adobestock-726557427--c2-a9-20vladan-20-e2-80-93-20stock-adobe-com-ki-generiert-3580x2016v1.jpeg "Astronomie erforscht die Welt der Galaxien und versucht, Entstehung, Aufbau und Entwicklung des Universums zu erklären. (Bild: © Vladan – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/a5/85/a585fd3e9719eb236ee815591f370261/ergonomischer-montagearbeitsplatz-gesuender-und-effizienter-arbeitenv1.jpeg "Ein ergonomisch eingerichteter Montagearbeitsplatz unterstützt effiziente Arbeitsabläufe und reduziert körperliche Belastungen. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/57/77/5777fa6040a24e6a62e9b06a5ba3196b/itemde-vogel-advertorial-mobile-roboter-in-der-industrie-headerbildv1.jpeg "Mit standardisierten Base Carts und individuell konfigurierbaren Top Modulen bietet item passgenaue Lösungen für unterschiedliche Transportaufgaben (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/50/8c/508ccaa2f4a61a0fecf84fde16ba45aa/schrittmotor-nema-24-erklaerung-und-anwendungen-die-sie-kennen-solltenv1.jpeg "Die Parametrierung und Inbetriebnahme des Integrierten Motors ST NEMA24 von item Industrietechnik erfolgen komfortabel mit der Software item MotionSoftStepper (Bild: item)")
Ultraschall Roboter hebt kleinste Objekte, ohne sie zu berühren
Ein an der ETH Zürich neu entwickelter Roboter kann empfindliche Kleinteile greifen, ohne sie zu berühren. Dazu lässt er sie mittels Schallwellen schweben.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/86700/86798/65.png "logo.png ()")
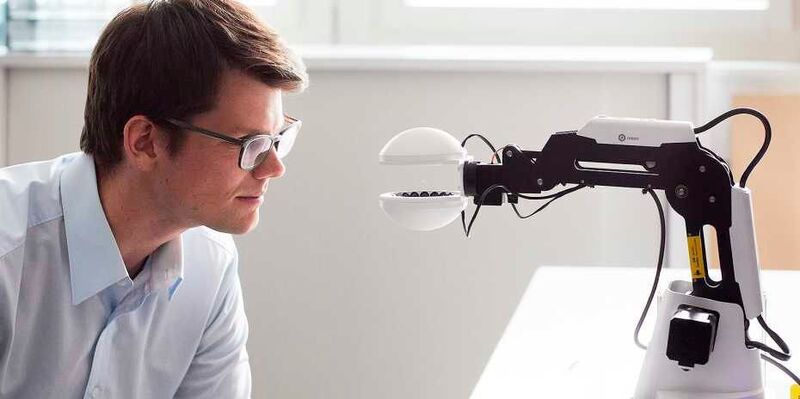
Bisher ist es nur ein Prototyp, den Marcel Schuck an der ETH Zürich entwickelt hat, aber die Idee ist vielversprechend: Zwischen zwei Halbkugeln schwebt eine kleine Kugel, in der Luft gehalten durch Ultraschallwellen. Mit dem neuen Verfahren können kleine Objekte ohne jegliche Berührung angehoben und manipuliert werden. Das ist vor allem dort relevant, wo Beschädigungen von Kleinteilen ins Geld gehen, so zum Beispiel in der Uhren- oder Halbleiterindustrie.
Heben, ohne zu greifen
Empfindliche Kleinteile werden heute häufig mit sogenannten „Soft Robotic Grippers“ gegriffen. Diese Greifer sind weich und gummiartig, um nichts zu beschädigen – weisen aber Nachteile auf. Zum einen beschmutzen sie wie ein viel gebrauchter Radiergummi, und zum anderen ist die Positioniergenauigkeit eingeschränkt. Auch gibt es so empfindliche Kleinteile, dass schon eine sanfte Berührung etwas zerstört.
Das neue Prinzip „No-Touch-Robotic“ überwindet diese Nachteile. Möglich macht es ein Effekt, der seit über 80 Jahren und vor allem in der Weltraumforschung angewandt wird. Ultraschallwellen erzeugen ein für uns nicht sicht- und hörbares Druckfeld. Indem die akustischen Wellen einander überlagern, werden Druckpunkte erzeugt, wo kleine Objekte gefangen werden können. Als Folge davon hängen sie scheinbar frei in der Luft – sie schweben in der akustischen Falle.
Objekte in der Schwebe steuern
Mittelfristig will Schuck einen robotergesteuerten Ultraschallgreifer aus dem Prototypen entwickeln. In zwei mittels 3D-Druck hergestellten Halbkugeln hat der 31-Jährige zahlreiche Mini-Lautsprecher eingebaut. Mit Hilfe einer Software kann er diese so ansteuern, dass sich die Druckpunkte verschieben lassen. Langfristiges Ziel ist es, deren Position in Echtzeit zu verändern, ohne dass das schwebende Objekt zu Boden fällt. Genau daran forscht der ETH-Doktorand Marc Röthlisberger, der mit Schuck sowie dem Masterstudenten Christian Burkard im Technopark Zürich eine Laborgemeinschaft bildet.
:quality(80)/images.vogel.de/vogelonline/bdb/1476800/1476884/original.jpg "Ein neues Robotersystem im Unternehmen – ab wann lohnt sich die Anschaffung? (©AndSus - stock.adobe.com)")
Industrieroboter
Ab wann sich die Anschaffung eines Robotersystems lohnt
Bereits mit der bestehenden Technik können die Forscher verschiedene Kleinteile im Raum bewegen. Die Software passt den Greifer an die Form des anzuhebenden Objekts an, der Roboterarm transportiert dieses an den Zielort.
Ein weiterer Vorteil des berührungslosen Greifers ist, dass man nur einen einzigen Greifer für unterschiedliche Formen braucht – in der klassischen Robotik benötigt man für fast jede neue Form einen separaten Greifer. Der Roboterarm selber muss nicht einmal sehr präzise sein. „Die exakte Positionierung erfolgt durch die mit der Software gesteuerten Ultraschallwellen“, erklärt Schuck.
Interessenten und Partner in der Industrie gesucht
Schuck will zunächst herausfinden, wie in der Praxis Robotergreifarme überhaupt gebraucht werden. „Hauptziel ist es, die Anwendungsgebiete kennen zu lernen und Türen in der Industrie aufzustoßen“, erklärt Schuck. Interessant dürfte die Entwicklung für die Uhrenindustrie sein, wo wegen kostbarer Kleinteile präzise Mikromechanik Pflicht ist. Zahnräder von Uhren beispielsweise werden erst mit Schmiermitteln versehen, dann wird die Dicke dieser Schicht gemessen. Auch feinste Berührungen könnten den dünnen Schmiermittelfilm zerstören. Auch die Mikrochipproduktion könnte für Schucks Technologie ein interessanter Markt sein.
:quality(80)/images.vogel.de/vogelonline/bdb/1569700/1569765/original.jpg "Ob mit oder ohne Menschen in der Nähe – Roboter müssen sicher konstruiert werden. (©TeraVector/stock.adobe.com)")
Safety
Industrieroboter sicher machen
Mithilfe einer Förderung erstellt Schuck eine Art Experimentierkoffer für potenzielle Kunden. Darin enthalten ist ein Robotergreifer, Steuerungssoftware und eine Anleitung. Wie das Endprodukt aussieht, ist noch nicht klar, erklärt Schuck: „Das kommt auf die Rückmeldungen aus der Industrie an.“ Er hofft, dass er ein paar Interessenten findet, mit denen er den Ultraschallgreifer gemeinsam weiterentwickeln kann – sodass dieser einerseits der Nachfrage auf dem Markt entspricht.
(ID:46323657)
:quality(80)/p7i.vogel.de/wcms/b4/2a/b42a8ca40bf6898c2738504b2ad9f7ae/0127564528v1.jpeg "Magnetisches Jamming eröffnet neue Möglichkeiten für die Mikrorobotik. (Bild: MPI-IS)")
:quality(80)/p7i.vogel.de/wcms/3c/8e/3c8eb17984a2ff4fba9859a10ad777bf/0126366157v2.jpeg "Im Rahmen eines Forschungsprojekts der ETH Zürich: Robotor Anymal hat gelernt, Badminton zu spielen. (Bild: Video: Nicole Davidson / ETH Zürich)")