:quality(80)/p7i.vogel.de/wcms/18/f6/18f66d31f5e85f6b65785d9975c7c206/2026-060-schaedigung-20metall-bild-202-1442x811v1.png "Unter Schubbelastung können Verunreinigungen in Form von steifen Partikeln dazu führen, dass das Volumen von Poren unter Verformung bis auf das Sechsfache steigt. (Bild: KIT)")
:quality(80)/p7i.vogel.de/wcms/25/4c/254c93f7769ee82b8be8d24b8a971a1b/bild1-pgn-plus-anwendungsbild-07-04-2018-5760x3238v1.jpeg "Dank einer digitalen Lösung für die Werkstoffauswahl konnte Schunk neue emissionsreduzierende Ansätze ermitteln und den CO2-Ausstoß von Produkten reduzieren. (Bild: Schunk)")
:quality(80)/p7i.vogel.de/wcms/ed/b9/edb95e3cf7d170ef13d917b24d14064d/newsimage423895-4000x2249v1.jpeg "Empa-Forschende wollen beschädigte Brücken und andere Stahlkonstruktionen mithilfe des 3D-Metalldrucks reparieren. (Bild: Empa)")
:quality(80)/p7i.vogel.de/wcms/1a/d9/1ad9efc8a86adc6031d22f7473e0d390/0132121730v1.jpeg "Nachdem es in den ersten vier Monaten 2026 für die deutsche Industrie in Sachen Auftragslage eher mau aussah, hat der Mai als Wonnemonat seinem Namen wohl Ehre gemacht. Analysten glauben nun zwar an mehr Sonne, doch die Wolken sind noch nicht verschwunden ... (Bild: Solarfans)")
:quality(80)/p7i.vogel.de/wcms/03/e3/03e358c7d85b64d95c4c2c972c7491f8/94048294.jpeg "Bei neuen Produktideen spielen die Kosten eine maßgebliche Rolle. Mit Design-to-Cost-Methoden lässt sich genau planen, wie Kosten am besten eingespart werden. (Bild: gemeinfrei)")
:quality(80)/p7i.vogel.de/wcms/89/c9/89c911ebddb1646a110a82e7e9900eae/manufacturing-20-26-20industrial-2-1450x816v1.png "Eine digitale Konstruktion schafft noch keinen digitalen Prozess. Manuelle Übergaben zwischen Konstruktion, Vertrieb und ERP verhindern dies und werden zunehmend zu Wachstumsproblemen. (Bild: Emporix)")
:quality(80)/p7i.vogel.de/wcms/f4/2b/f42bec200a7167f1099a0e93f24bd855/image-cellsius-2560x1440v1.jpeg "Die H2-Sling, das erste wasserstoffbetriebene Flugzeug der Schweiz, wurde entwickelt von Cellsius an der ETH Zürich. (Bild: Cellsius)")
:quality(80)/p7i.vogel.de/wcms/fe/44/fe4429452f6e877efbde25279f384c71/konstrukteur-mit-cad-daten-am-pc-1536x864v1.png "CAD-Modelle und technische Dokumentationen ermöglichen eine schnelle Integration in Konstruktionen und reduzieren manuelle Arbeitsschritte. (Bild: BeeWaTec AG)")
:quality(80)/p7i.vogel.de/wcms/0d/83/0d8341a4a7aece08db829b730ba4578f/ids-case-study-dlr-header-3000x2000-copyright-20dlr-20-26-20ids-3000x1687v1.jpeg "Die Ensenso 3D-Kamera sorgt bei der Fertigung von Flugzeugkabinen für die hochpräzise Erfassung und Ausrichtung der Bohrpositionen. (Bild: Deutsches Zentrum für Luft- und Raumfahrt e.V & IDS Imaging Development Systems GmbH)")
:quality(80)/p7i.vogel.de/wcms/83/93/83935dca5289556988d7d2e9f2183d82/-sb-3254-3000x1687v1.jpeg "Würzburg im Oktober heißt: zwei Tage rund um die Frage, wie sich Produktentwicklung heute effizient und zukunftsfähig gestalten lässt. (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/e9/03/e90306f116f570daebed16b9684b9445/item-20fa-20schutzz-c3-a4une-20planen-20-bild2-1469x827v1.png "Digitale Konfiguratoren wie die von Item vereinfachen die Planung kompletter Schutzzäune über eine intuitive Benutzeroberfläche. (Bild: Item)")
:quality(80)/p7i.vogel.de/wcms/c9/47/c947857cac38244999f2b6f4e96a01de/thedigitalartist-ai-generated-8070000-3120x1754v1.jpeg "Die NIS-2-Richtlinie ist in Deutschland bereits am 6. Dezember 2025 in Kraft getreten – doch nur wenige Unternehmen haben die Vorgaben bislang umgesetzt. (Bild: TheDigitalArtist)")
:quality(80)/p7i.vogel.de/wcms/a0/03/a003d1d5ee83399f232303f7c50bd93b/geralt-statistics-4623842-4752x2672v1.jpeg "Erholung mit Risiken: Deutschlands Wirtschaft zwischen geopolitischer Unsicherheit und technologischem Aufschwung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/aa/e1/aae1d4890329b20e40f4ebbc782705c7/aussenhandel-saisonbereinigt-2048x1151v1.png "Im April 2026 sind die deutschen Exporte gegenüber März 2026 kalender- und saisonbereinigt um 0,9 Prozent und die Importe um 1,2 Prozent gestiegen. (Bild: Destatis)")
:quality(80)/p7i.vogel.de/wcms/76/32/763233e84c4054d0c8634dad6c6141fc/adobestock-2035398302-2730x1536v1.jpeg "Wir zeigen, wie aus mechanischen Fächern und maritimen Lüftungssystemen der moderne Hochleistungsventilator wurde. (Bild: © Olga Ко – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/09/2a/092ad24dd4b603abc12e017024d5be85/digitalerzwillingjoseph-von-fraunhofer-20-282-29-6200x3489v1.jpeg "Auf der Hannover Messe 2026 konnten sich Besucher mit dem digitalen Zwilling von Joseph von Fraunhofer unterhalten – das Metaverse und KI machen es möglich. (Bild: Fraunhofer-Gesellschaft)")
:quality(80)/p7i.vogel.de/wcms/2f/2b/2f2b46d8cd0987790d053a0ecc434833/aumovio-pp-dtco-1-1772x997v1.jpeg "20 Jahre digitaler Tachograph: Wie sich das Gerät vom Kontrollgerät zum Datenhub im Güterverkehr entwickelt hat. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/bf/45/bf4523ff21e3add62ccd8390c5bfea7a/adobestock-726557427--c2-a9-20vladan-20-e2-80-93-20stock-adobe-com-ki-generiert-3580x2016v1.jpeg "Astronomie erforscht die Welt der Galaxien und versucht, Entstehung, Aufbau und Entwicklung des Universums zu erklären. (Bild: © Vladan – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/50/8c/508ccaa2f4a61a0fecf84fde16ba45aa/schrittmotor-nema-24-erklaerung-und-anwendungen-die-sie-kennen-solltenv1.jpeg "Die Parametrierung und Inbetriebnahme des Integrierten Motors ST NEMA24 von item Industrietechnik erfolgen komfortabel mit der Software item MotionSoftStepper (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/a1/64/a16493ce8f1e75a27e82aba33532b391/lineartechnik-einfach-erklaert-definition-vorteile-anwendungv1.jpeg "Lineartechnik kommt überall dort zum Einsatz, wo geführte Bewegungen entlang einer Achse erforderlich sind. Das item Linearsystem bietet die Basis für Einzelachsen, Synchronachsen sowie Mehrachsportale. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/45/8a/458add2ba48d38497829522cac80bbae/reinraum-fuer-pharma-medizintechnik-7-herausforderungen-und-wie-sie-sie-loesenv1.jpeg "Arbeiten unter Reinraumbedingungen: In der Pharma- und Medizintechnik sind kontrollierte Umgebungen eine zentrale Voraussetzung für sichere Produktionsprozesse. (Bild: item)")
Handhabung Sicherer und sensibler Griff ohne Abdrücke
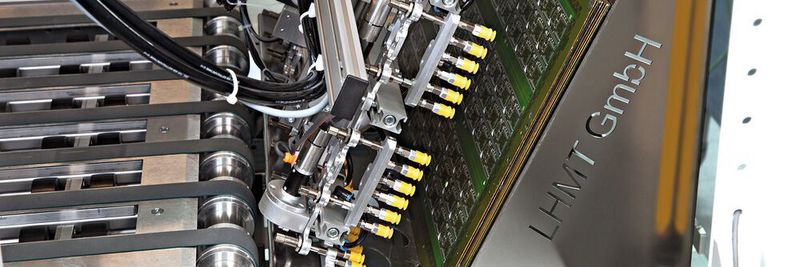
LHMT entwickelt hoch spezialisierte Werkzeugmaschinen für die Halbleiterindustrie. Für die sichere und schonende Handhabung von Leiterplatinen kommen Sauger von Schmalz zum Einsatz.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/45600/45637/65.jpg "IEF Logo_grau_rot.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/20800/20842/65.jpg "Logo_42mm.JPG ()")
Ein langer Weg: Bis eine fertige Leiterplatte einbaubereit ist, durchläuft sie viele verschiedene Prozessschritte. Von nasschemischen Verfahren wie dem Kupferätzen über Bohren und Belichten muss der Rohling einiges über sich ergehen lassen, bevor er in den LHMT-Maschinen landet.
Handlinggeräte zur Be- und Entladung
Die LHMT GmbH entwickelt Sondermaschinen im Bereich CNC- und Automatisierungstechnik sowie Roboterautomation und Bildverarbeitung für die Halbleiterindustrie. Leiterplatten-Handling und Manufacturing Technologies – so die Bedeutung der Firmeninitialen – wurde 2002 gegründet und gehört zur Schmoll-Maschinen-Gruppe, die Anlagen für die Elektronikmassenproduktion und Mikrobearbeitung herstellt.
:quality(80)/images.vogel.de/vogelonline/bdb/1738700/1738715/original.jpg "(LHMT)")
:quality(80)/images.vogel.de/vogelonline/bdb/1738700/1738716/original.jpg "(J. Schmalz GmbH)")
:quality(80)/images.vogel.de/vogelonline/bdb/1738700/1738717/original.jpg "(J. Schmalz GmbH)")
:quality(80)/images.vogel.de/vogelonline/bdb/1738700/1738719/original.jpg "(J. Schmalz GmbH)")
Die Handlinggeräte der LHMT dienen zur Be- und Entladung der einzelnen Fertigungsprozesse. Bei den Ritzmaschinen bekommt der einzelne Nutzen – also die Gesamtleiterplatte – am Ende seines kompletten Fertigungsprozess seine Sollbruchstellen, um später das Herausbrechen einzelner Leiterplatten zu ermöglichen. Ein wichtiger Schritt, denn der spanende Bearbeitungsschritt gibt der Leiterplatte das für die spätere Anwendung notwendige Layout.
Roboter entnehmen die Rohlinge
„Weil die Werkstücke immer feiner und sensibler werden, setzen wir hier auf einen vollautomatischen Prozess“, erklärt Knut Handte, Leiter der Konstruktion bei LHMT. Das bedeutet: Die in sogenannten Schrägkassetten oder auch Warenträgern bereitgestellten Leiterplatten-Rohlinge werden automatisch von einem Handlinggerät einzeln über einen 6-Achs-Roboter entnommen, durch eine CCD-Kamera (Charge Coupled Device) werden die Stiftaufnahmen vermessen, anschließend werden die Rohlinge der Ritzmaschine übergeben.
„Was so einfach klingt, birgt so manche Herausforderung. Denn: Leiterplatte ist nicht gleich Leiterplatte“, betont Handte. Während in Smartphones besonders dünne und leichte Platinen zu finden sind, kommen in Servern eher dicke und massive Versionen mit viel Kupfer zum Einsatz. Allen Exemplaren gleich ist die äußerst empfindliche Oberfläche, auf der keine Abdrücke zurückbleiben dürfen. „Gegriffen wird deshalb meist außen, am sogenannten Blendrand – und natürlich mit Vakuum“, erläutert der Konstruktionsleiter. Der Greifer muss dabei nicht nur mit unterschiedlichen Formaten, sondern auch mit vorhandenen Referenzbohrungen zurechtkommen. Daran richtet sich die Ritzmaschine aus und liefert somit ein exaktes Ergebnis.
Immer weniger Platz für den Greifer
Zudem bleibt dem Greifer immer weniger Platz: Die Komplexität der Platinen steigt mit dem Anspruch, immer mehr Funktionen auf immer kleineren Flächen unterzubringen. „Außerdem ist zu bedenken, dass auf unseren Maschinen unterschiedliche Leiterplatten bearbeitet werden – entsprechend universell und flexibel müssen die Prozessschritte und das Handhabungssystem sein. Nur so können wir hohe Rüstzeiten vermeiden“, fügt Handte hinzu.
Diese Flexibilität ist vor allem für das automatisierte Zuführsystem eine Herausforderung. LHMT hat in Kooperation mit den Vakuum-Experten der J. Schmalz GmbH zwei unterschiedliche Automationslösungen erarbeitet und erprobt. Eine nutzt einen flexiblen Roboterarm, der verschiedene Be- und Entladeschritte auf wenig Raum durchführen kann. Alternativ können die Platten über ein Achssystem abgeholt und dann auf der Riemenbahn abgelegt werden.
:quality(80)/images.vogel.de/vogelonline/bdb/1624000/1624076/original.jpg "Mittel- und langfristig geht der Trend zum autonomen Greifen. In Pilotanwendungen mit der Schunk SVH 5-Fingerhand verdeutlicht Schunk, was heute über eine Kombination aus flexiblen Greifern, Sensorik und Künstlicher Intelligenz bereits möglich ist. (Schunk)")
Greifsysteme
Sensorikboom bei Greifsystemen
„Solche Systeme sind im Vergleich zu Robotern günstiger, jedoch nicht ganz so flexibel. Die Zykluszeit ist dagegen bei 2-Achs-Systemen weitaus geringer: Aktuell erreichen wir bei unserer RobiFlex2x1-Anlage eine Taktzeit von weniger als sechs Sekunden. Bei der Verwendung von Zwischenlagen kommt die Anlage auf elf Sekunden. Dabei werden alle Teile ausschließlich mit einem Vakuum-Greifer gegriffen“, erklärt der Konstruktionsleiter.
Sensible Handhabung
Während LHMT mechanische Komponenten wie Roboteranbindung, Greiferkonstrukt oder Achssystem entwickelte, hat Schmalz die Komponenten für den Handhabungsprozess geliefert: die Sauger und deren Anbindung an den Greifer. „Jede einzelne Platte ist sensibel zu handhaben, ohne Abdrücke zu hinterlassen. Gleichzeitig erfordern die schnellen Bewegungsabläufe ein sicheres Halten der Platte – natürlich ohne sie zu deformieren“, erläutert Christian Stoisser, Internationales Branchen- und Key Account Management Elektronik bei Schmalz.
Eine weitere Besonderheit im Umgang mit Leiterplatten und anderen elektronischen Bauteilen ist die Gefahr, Schäden durch elektrostatische Entladungen unter anderem in der Leistungselektronik zu verursachen. Sichtbar sind diese nicht, machen sich aber am Ende beim Funktionstest bemerkbar. „Unser Fräs- und Ritzprozess steht relativ weit am Ende der Wertschöpfungskette. Das bedeutet, dass der Wert der Leiterplatte bereits sehr hoch ist und wir daher natürlich die Ausschussrate möglichst gering halten wollen“, verdeutlicht Handte.
:quality(80)/images.vogel.de/vogelonline/bdb/1719000/1719059/original.jpg "Welche Technologien machen die Montage und Handhabung wirklich flexibel und effizient? Cobots stellen eine Möglichkeit dar. (Albrecht Jung GmbH)")
Montage und Handhabung
Was macht die Montage flexibler und effizienter?
Speziell zum Schutz vor ungewollter Entladung hat Schmalz Sauger vom Typ NBR-ESD mit einem spezifischen Widerstand entwickelt. In Kombination mit den leitenden Federstößeln FSTIm stellt der Vakuum-Experte eine gute Verbindung in jeder Greiferposition sicher und schützt damit die Leiterplatte zuverlässig. Montiert sind die Sauger an Saugspinnen, die aus Aluminiumprofilen individuell aufgebaut werden. „Das leichte Aluminium ist eine Grundvoraussetzung für kurze Zykluszeiten. Ein mechanischer Greifer würde den Aufbau zu schwer machen und der Roboter könnte nicht mehr so schnell verfahren“, sagt Konstruktionsleiter Handte.
Sehr schnelle Prozesse bewältigen
Ist die Handlinglösung an die Sondermaschine angeschlossen, fährt die Leiterplatte nach erfolgreicher Entnahme und Ablage in den Ritzautomaten. Darüber hinaus bietet LHMT auch Handlingsgeräte zum Be- und Entladen von kompletten Fertigungsschritten an, beispielsweise für Reinigungs- oder Ätzlinien. „Sechs Platten pro Minute ist eine realistische Taktzahl“, erklärt Handte. Dazwischen muss das Handhabungssystem die schützenden Lagen zwischen den Leiterplatten noch automatisiert und separat ablegen und flexibel auf Kassettenwechsel reagieren. „Das bedeutet, dass die Automatisierung sehr viel schneller sein muss, um eine kontinuierliche Beladung der Prozessanlage sicher zu stellen und alle Zusatzaufgaben just in time abzuarbeiten.“
Währenddessen findet der vollautomatische Ritzprozess der Leiterplatte statt, der einem kundenindividuellen Programm folgt. Dabei kann die Maschine je nach Ausführung sowohl längs als auch quer ritzen. Nach dem Prozess lässt sich die Leiterplatte ohne manuellen Eingriff automatisiert entnehmen. Nach dem Ausbrechen und der abschließenden Qualitätskontrolle sind die Leiterplatten bereit für den Versand und die Bestückung. (jv)
(ID:46827706)
:quality(80)/p7i.vogel.de/wcms/b7/a5/b7a5e9430240e9cbd8a8c71ac7c026eb/0127461340v2.jpeg "Die bioabbaubare Maus funktioniert wie jede andere Computermaus. Das 3D-gedruckte Gehäuse haben die Forschenden aus einem Gemisch aus bioabbaubarem Kunststoff und Holzfasern hergestellt. (Bild: Empa)")
:quality(80)/p7i.vogel.de/wcms/5f/ca/5fcae0c625c4ff42fed9b7365d09e938/0126542211v2.jpeg "Längere Lebensdauer und geringerer Energieverbrauch im Destaco Boxgreifer, optimiert mit ACE Kleinstoßdämpfern der MC-Familie. (Bild: Stabilus)")