:quality(80)/p7i.vogel.de/wcms/83/93/83935dca5289556988d7d2e9f2183d82/-sb-3254-3000x1687v1.jpeg "Würzburg im Oktober heißt: zwei Tage rund um die Frage, wie sich Produktentwicklung heute effizient und zukunftsfähig gestalten lässt. (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/b0/f7/b0f71d963fc5e58de9a4db742b24300c/comsol-1331x748v1.jpeg "Trionda in seinem natürlichen Habitat. (Bild: Comsol)")
:quality(80)/p7i.vogel.de/wcms/18/c0/18c07c769db4df3a950fb887719265dc/general-fusion-lm26-7008x3940v1.jpeg "General Fusion nutzt multiphysikalische Simulationen, um das Verhalten seiner Fusionsdemonstrationsanlage zu analysieren und zu optimieren. (Bild: General Fusion)")
:quality(80)/p7i.vogel.de/wcms/89/c9/89c911ebddb1646a110a82e7e9900eae/manufacturing-20-26-20industrial-2-1450x816v1.png "Eine digitale Konstruktion schafft noch keinen digitalen Prozess. Manuelle Übergaben zwischen Konstruktion, Vertrieb und ERP verhindern dies und werden zunehmend zu Wachstumsproblemen. (Bild: Emporix)")
:quality(80)/p7i.vogel.de/wcms/6e/35/6e3563e715be749a19ceacd881c438b9/fachbeitrag-tda-inventor-pdm-2730x1536v1.png "Drei Tage für eine Variante, die sich hätte automatisieren lassen: Warum manuelle Konstruktionsprozesse heute keine Option mehr sind. (Bild: Lino GmbH)")
:quality(80)/p7i.vogel.de/wcms/35/21/35215b04eac3455313ca51b72792c041/max-6-1080x608v1.png "IPF Electronic hat für das Unternehmen und alle Mitarbeiter eigene verbindliche Richtlinien für die Nutzung Künstlicher Intelligenz erarbeitet. (Bild: IPF Electronic)")
:quality(80)/p7i.vogel.de/wcms/bb/3a/bb3a3e3e2325113eb1ed97c5002a202f/-28c-29designbyfreepik2-5376x3022v1.jpeg "Humanoide Roboter könnten bereits in den kommenden zehn Jahren zu einem der wichtigsten Werkzeuge der modernen Industrie- und Dienstleistungsgesellschaft werden. (Bild: FreePik2)")
:quality(80)/p7i.vogel.de/wcms/e9/03/e90306f116f570daebed16b9684b9445/item-20fa-20schutzz-c3-a4une-20planen-20-bild2-1469x827v1.png "Digitale Konfiguratoren wie die von Item vereinfachen die Planung kompletter Schutzzäune über eine intuitive Benutzeroberfläche. (Bild: Item)")
:quality(80)/p7i.vogel.de/wcms/c9/47/c947857cac38244999f2b6f4e96a01de/thedigitalartist-ai-generated-8070000-3120x1754v1.jpeg "Die NIS-2-Richtlinie ist in Deutschland bereits am 6. Dezember 2025 in Kraft getreten – doch nur wenige Unternehmen haben die Vorgaben bislang umgesetzt. (Bild: TheDigitalArtist)")
:quality(80)/p7i.vogel.de/wcms/a0/03/a003d1d5ee83399f232303f7c50bd93b/geralt-statistics-4623842-4752x2672v1.jpeg "Erholung mit Risiken: Deutschlands Wirtschaft zwischen geopolitischer Unsicherheit und technologischem Aufschwung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/aa/e1/aae1d4890329b20e40f4ebbc782705c7/aussenhandel-saisonbereinigt-2048x1151v1.png "Im April 2026 sind die deutschen Exporte gegenüber März 2026 kalender- und saisonbereinigt um 0,9 Prozent und die Importe um 1,2 Prozent gestiegen. (Bild: Destatis)")
:quality(80)/p7i.vogel.de/wcms/0c/a8/0ca87f2101343b426f8a2efa3f7ed80b/adobestock-1979349822--c2-a9-20deni-20-e2-80-93-20stock-adobe-com-ki-generiert-4093x2304v1.jpeg "Ingenieure sind das entscheidende Bindeglied für KI im Praxiseinsatz. Sie bringen das essenzielle Wissen mit, KI-Modelle zu trainieren, einzuschätzen und richtig anzuwenden. (Bild: © deni – stock.adobe.com | KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/09/2a/092ad24dd4b603abc12e017024d5be85/digitalerzwillingjoseph-von-fraunhofer-20-282-29-6200x3489v1.jpeg "Auf der Hannover Messe 2026 konnten sich Besucher mit dem digitalen Zwilling von Joseph von Fraunhofer unterhalten – das Metaverse und KI machen es möglich. (Bild: Fraunhofer-Gesellschaft)")
:quality(80)/p7i.vogel.de/wcms/2f/2b/2f2b46d8cd0987790d053a0ecc434833/aumovio-pp-dtco-1-1772x997v1.jpeg "20 Jahre digitaler Tachograph: Wie sich das Gerät vom Kontrollgerät zum Datenhub im Güterverkehr entwickelt hat. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/bf/45/bf4523ff21e3add62ccd8390c5bfea7a/adobestock-726557427--c2-a9-20vladan-20-e2-80-93-20stock-adobe-com-ki-generiert-3580x2016v1.jpeg "Astronomie erforscht die Welt der Galaxien und versucht, Entstehung, Aufbau und Entwicklung des Universums zu erklären. (Bild: © Vladan – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/bc/49/bc4957f73a884d8ee1356914659cf2f4/adobestock-325234002--c2-a9-20karyna-20-e2-80-93-20stock-adobe-com-5490x3087v1.jpeg "Riesenräder sind mehr als eine Attraktion, sie sind ein Symbol für technologischen Fortschritt. (Bild: © Karyna – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/50/8c/508ccaa2f4a61a0fecf84fde16ba45aa/schrittmotor-nema-24-erklaerung-und-anwendungen-die-sie-kennen-solltenv1.jpeg "Die Parametrierung und Inbetriebnahme des Integrierten Motors ST NEMA24 von item Industrietechnik erfolgen komfortabel mit der Software item MotionSoftStepper (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/a1/64/a16493ce8f1e75a27e82aba33532b391/lineartechnik-einfach-erklaert-definition-vorteile-anwendungv1.jpeg "Lineartechnik kommt überall dort zum Einsatz, wo geführte Bewegungen entlang einer Achse erforderlich sind. Das item Linearsystem bietet die Basis für Einzelachsen, Synchronachsen sowie Mehrachsportale. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/45/8a/458add2ba48d38497829522cac80bbae/reinraum-fuer-pharma-medizintechnik-7-herausforderungen-und-wie-sie-sie-loesenv1.jpeg "Arbeiten unter Reinraumbedingungen: In der Pharma- und Medizintechnik sind kontrollierte Umgebungen eine zentrale Voraussetzung für sichere Produktionsprozesse. (Bild: item)")
Getriebe Wie Robotergetriebe dynamische Positionieraufgaben optimieren
Das Getriebe eines Roboters muss vielen unterschiedlichen Anforderungen gerecht werden. Die Getriebe der Baureihe SHG von Harmonic Drive sind ideal darauf eingestellt.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/76800/76895/65.jpg "FAULHABER_120mm.jpg ()")
Die Robotik hat sich zu einer der Leitdisziplinen des 21. Jahrhunderts entwickelt. Während das Anforderungsprofil an Roboter kontinuierlich steigt und unter anderem Eigenschaften wie Autonomie und Mobilität in den Fokus rücken, steht die Robotik ihren Komponenten mit eigenen Ansprüchen gegenüber.
So werden vom Roboter eine hohe Dynamik und ein schnelles Anfahren der Zielposition gefordert, um beim Bauteilhandling kurze Taktzeiten zu ermöglichen. Der Roboter selbst muss daher eine kompakte Struktur, verbunden mit einem geringen Eigengewicht, aufweisen – nur so lassen sich die geforderten dynamischen Eigenschaften bereitstellen. Mit dem Ziel, Bauteile punktgenau greifen und ablegen zu können, wird zudem eine hohe Präzision beim wiederholten Anfahren von Positionen als auch eine exakte Verfolgung von Bewegungsbahnen benötigt. Allgegenwärtig ist darüber hinaus das Bestreben nach Robustheit, Zuverlässigkeit und Wartungsfreiheit eines Roboters.
:quality(80):fill(efefef,0)/images.vogel.de/vogelonline/bdb/1434300/1434348/original.jpg "Whitepaper Cover: Redaktion konstruktionspraxis")
Anforderungen an das Antriebssystem
Aus dem Anforderungsprofil des Roboters ergeben sich entsprechende Ansprüche an die Komponenten seines Antriebssystems. Insbesondere das Getriebe muss vielen unterschiedlichen Anforderungen gerecht werden. Gefragt sind höchste Drehmomentdichte, präzise Bewegungsübertragung, Robustheit und Zuverlässigkeit, oft auch eine große Hohlwelle sowie ein kompaktes Abtriebslager mit hoher Tragfähigkeit.
Achsen von Robotern müssen bei der Beschleunigung und Verzögerung des Roboters hohe Drehmomente übertragen. Gleichzeitig darf der Antrieb selbst nur ein geringes Eigengewicht und sehr kompakte Abmessungen aufweisen. Je weiter der Gelenkantrieb von der ersten Achse entfernt ist, desto leichter sollte er sein, denn sein Gewicht erhöht das Massenträgheitsmoment für die vorgeschalteten Achsen und reduziert somit die Dynamik sowie die Traglast des Roboters. Dabei spielt nicht nur das eigentliche Gewicht des Getriebes eine Rolle, sondern auch seine Abmessungen. Denn mit zunehmender Größe des Getriebes wächst auch das Gewicht der Strukturteile, wie der Gehäuse, überproportional. Speziell die weiter entfernten Handachsen müssen daher hohe Drehmomente bei geringem Gewicht und kleinen Abmessungen bereitstellen.
Hohe Dynamik und verkürzte Taktzeiten
Die Harmonic-Drive-Getriebe der Baureihe SHG-2SH zeichnen sich durch höchste Drehmomentdichte aus. Sie ergibt sich aus ihrem besonderen Funktionsprinzip. Bei einem Wellgetriebe sind untersetzungsabhängig bis zu 30 % aller Zähne gleichzeitig im Eingriff, wodurch sich die Belastung auf viele Zähne und symmetrische Belastungszonen verteilt. Durch ein optimiertes Zahnprofil und eine bessere Lastverteilung im Wave-Generator-Lager wurden die übertragbaren Drehmomente der SHG-Getriebe noch einmal um ca. 30 % gegenüber dem Vorgängerprodukt HFUS gesteigert. Das Getriebe trägt somit zu einer höheren Dynamik und einer Verkürzung der Taktzeiten beim Bauteilhandling bei.
Das SHG-2SH ist als sogenannte Simplicity Getriebe aufgebaut. Es besteht ausschließlich aus dem Einbausatz und dem Abtriebslager. Durch Nutzung der vorhandenen Gehäusestruktur zur Abstützung der Lager der Eingangswelle kann auf einen separaten An- und Abtriebsflansch verzichtet und das Gesamtgewicht deutlich reduziert werden. Somit eignet sich diese Bauform ideal für die bewegten Roboterachsen, bei denen die Reduktion des Gewichtes eine deutliche Verbesserung der Dynamik und Tragfähigkeit des Roboterarms zur Folge hat.
Präzision und Spielfreiheit
Bei der Montage von Elektronikbauteilen ist höchste Präzision bei der Positionierung des Roboterarms gefragt, um eine gleichbleibende Qualität sicherzustellen. Typischerweise wird eine Wiederholgenauigkeit des Roboters von ± 0,1 mm gefordert. Dies bedeutet, wenn der Roboterarm eine Position anfährt, verschwenkt und anschließend die gleiche Position erneut anfährt, so erreicht er die ursprüngliche Position mit einer maximalen Abweichung von ± 0,1 mm. Ein beachtlich kleiner Wert, wenn man bedenkt, dass er das Resultat der Wiederholgenauigkeit von bis zu 6 Achsen ist und diese Genauigkeit über die gesamte Lebensdauer des Roboters erhalten werden soll.
:quality(80):fill(efefef,0)/images.vogel.de/vogelonline/bdb/1340500/1340502/original.jpg "Whitepaper Cover: Vogel Business Media")
Eine solche Genauigkeit lässt sich nur mit spielfreien Getrieben realisieren. Spielfreiheit bedeutet, dass sich der Getriebeabtrieb bei blockiertem Getriebeeingang unter wechselnder Drehmomentrichtung nicht bewegt. Planetengetriebe beispielsweise benötigen prinzipbedingt immer ein definiertes Zahnflankenspiel, damit es nicht zu einem Verklemmen oder übermäßigem Verschleiß kommt.
Hohe Wiederholgenauigkeit

Wellgetriebe zeichnen sich dagegen durch einen spielfreien Zahneingriff aus. Dies wird durch die prinzipbedingte Vorspannung des Getriebes über den sogenannten Coning Effekt erreicht (siehe Abbildung 1). Die Spielfreiheit wird über die komplette Lebensdauer des Getriebes aufrechterhalten. Selbst bei fortgeschrittener Betriebszeit und beginnendem Verschleiß bleibt die Vorspannung des Zahneingriffs erhalten und das Getriebe frei von störendem Umkehrspiel. Somit erreichen die Getriebe der SHG-Baureihe eine Wiederholgenauigkeit kleiner ± 0,1 Winkelminuten.
Bei der Montage des Wave Generators wird der Flexspline im Bereich der großen Hauptachse der Ellipse konisch aufgeweitet. Wird nun der Circular Spline montiert, so wird der Flexsplinetopf wieder in Richtung des Wave Generators elastisch verformt. Dies bewirkt eine konstante Vorspannung der Verzahnung von Flexspline und Circular Spline, die einen spielfreien Zahneingriff über die komplette Lebensdauer des Getriebes ermöglicht.
Getriebe mit exzellenter Übertragungsgenauigkeit
Bei der Applikation von Klebstoffen, beispielsweise in der Montage von Automobilteilen, muss eine vorgegebene Bewegungsbahn sehr genau und wiederholbar abgefahren werden. Dies erfordert einerseits eine präzise Koordination der Drehung der Roboterachsen durch die Steuerung des Roboters, andererseits auch Getriebe mit höchster Übertragungsgenauigkeit.
Die Übertragungsgenauigkeit ist ein Maß für die Abweichung zwischen dem theoretischen Abtriebswinkel, der sich bei der Drehung des Getriebeeingangs um einen bestimmten Winkel ergeben soll, und dem realen Abtriebswinkel, der sich am Getriebeausgang einstellt. Je kleiner der Übertragungsfehler des Getriebes ist, umso besser kann beispielsweise der Roboterarm einem vorgegebenen Bahnprofil folgen. Die Getriebe der Baureihe SHG weisen eine exzellente Übertragungsgenauigkeit von < 1 Winkelminute auf und tragen somit entscheidend zur Genauigkeit der Bahnverfolgung des Roboters bei.
Roboter müssen robust und zuverlässig sein
Roboter sind häufig im Dauereinsatz, zum Beispiel beim Bauteilhandling oder Palettieren von Komponenten. Solche Anwendungen verlangen Zuverlässigkeit, überdurchschnittliche Lebensdauer, Robustheit und Wartungsarmut von der Automatisierungslösung.
Die SHG-Getriebe bieten in diesen Anwendungen einen entscheidenden Vorteil. Die Lebensdauer des Einbausatzes wurde dank verbesserter Schmierstoffe und optimierten Belastungsverhältnissen am Wave Generator-Lager im Vergleich zum Vorgängerprodukt HFUS noch einmal um etwa 40 % gesteigert. Die Nennlebensdauer L10 liegt bei 10 000 statt bisher 7 000 Stunden. Die fettgeschmierten Getriebe punkten hierbei mit einer Lebensdauerschmierung, eine Wartung zum Nachschmieren wird daher meist überflüssig. Der Anwender profitiert von einer höheren Verfügbarkeit des Roboters.
Hierzu trägt auch die Überlastfähigkeit des Getriebes bei. Im Fall von Not-Aus-Situationen können hohe Lastspitzen auf das Getriebe einwirken. Die Getriebe der SHG-Baureihe sind diesen Belastungen durchaus gewachsen. Das Verhältnis zwischen Kollisionsdrehmoment und Nenndrehmoment liegt abhängig von Baugröße und Untersetzung bei Faktor 4 bis 7. Durch ein optimiertes Verzahnungsprofil wurde das Kollisionsdrehmoment gegenüber dem Vorgängergetriebe HFUS zudem um etwa 30 % gesteigert.
:quality(80)/images.vogel.de/vogelonline/bdb/1052400/1052486/original.jpg "Der nahezu hundertprozentige Kontakt innerhalb der Zykloiden-Bolzen-Konstruktion und die gleichmäßige Kraftverteilung innerhalb des Getriebes erlauben eine hohe Belastung bei geringem Spiel. (Nabtesco)")
Getriebe
Die Welt der Getriebe im Überblick
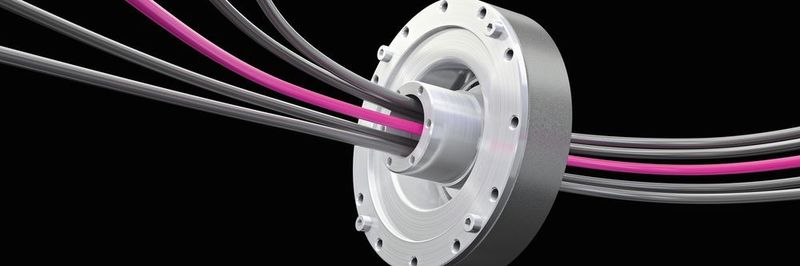
Große Hohlwelle für bessere Durchführung
Die Getriebebauform 2SH bietet eine zentrale Hohlwelle. Die Vorteile der Hohlwellenkonstruktion für die Robotik liegen auf der Hand. Sie ermöglicht einerseits die Durchführung von Versorgungsleitungen für den Antriebsmotor der nächsten Achse, andererseits können Steuer-, Sensor- und Pneumatikleitungen für den Greifer oder andere Manipulatoren im Inneren der Achse durchgeführt werden. Dies minimiert die Gefahr, dass sich die gebündelten Leitungen bei sehr komplexen Bewegungsabläufen um die vorderen Roboterachsen wickeln. Zudem bedeutet dies eine erhebliche Erweiterung der Bewegungsfreiheit des Roboters.
Zur präzisen Bewegungsübertragung ist neben einem hochgenauen Getriebeeinbausatz auch ein Abtriebslager mit höchster Präzision erforderlich. Bei der Bauform 2SH findet das Kreuzrollenlager zwischen dem Circular Spline und dem Flexspline-Abtrieb Platz. Kompakter kann ein Lagersystem, welches hohe Axial- und Radialkräfte sowie Kippmomente aufnimmt, nicht aufgebaut werden. In vielen Leichtbaurobotern und Cobots wird aufgrund der hohen Tragfähigkeit und Kippsteifigkeit des Kreuzrollenlagers auf eine weitere Lagerstelle verzichtet. Dies vereinfacht den Aufbau wie auch die Montage der Roboterachse erheblich.
:quality(80)/images.vogel.de/vogelonline/bdb/1509900/1509977/original.jpg "Getriebe bleiben auch in der zunehmend digitalen Welt eine wichtige mechanische Komponente im elektrischen Antriebsstrang von Maschinen und Anlagen. (gemeinfrei)")
Getriebe
Hier dreht sich alles ums Getriebe
Konsequente Funktionsintegration
Ein weiterer Beitrag zum Leichtbau des Roboterarms ist die Integration von weiteren Funktionen in das Getriebe. Die Hohlwelle der SHG-2SH Getriebe wird in vielen Leichtbaurobotern gleichzeitig als Rotorwelle des Antriebsmotors genutzt. Hierfür werden die Magnete des permanent erregten Synchronmotors direkt auf der Hohlwelle des Getriebeeingangs befestigt. Das Wicklungspaket sitzt direkt neben dem Getriebe. Motor und Getriebe bilden eine kompakte Einheit. Die koaxiale Anordnung hat gleich mehrere Vorteile. Der Antriebsmotor muss nicht parallel zum Getriebe gesetzt werden, somit entfällt die Notwendigkeit einer Stirnrad- oder Riemenvorstufe. Darüber hinaus wird die Hohlwelle des Getriebes nicht vom Motor verdeckt und kann für die Kabeldurchführung von Versorgungsleitungen genutzt werden. Aufgrund der Funktionsintegration kann das Gesamtgewicht der Antriebsachse wesentlich reduziert werden.)

Hannover Messe 2019: Halle 14/15, B05
:quality(80)/images.vogel.de/vogelonline/bdb/1443500/1443554/original.jpg "Der Bolide Edge 9 fuhr auf den dritten Platz eines Teilwettbewerbs der Formula Student Spain. (Kisssoft)")
Konstruktion
Optimiertes Getriebe erhöht Agilität des Motors
* Sebastian Finhold ist Produktmanager Mechanik bei der Harmonic Drive AG
(ID:45697713)
:quality(80)/p7i.vogel.de/wcms/20/a5/20a5f9ccab342e6e1765861a2b9e83c8/0127209616v2.jpeg "Die Lagerkräfte werden über die Kreuzrollenlager abgeleitet. Der Sensor erfasst daher nur das Drehmoment. (Bild: Harmonic Drive)")
:quality(80)/p7i.vogel.de/wcms/d1/83/d18319f65e8aa7fd6d4e63f46ed05af3/0126432912v2.jpeg "Neu auf dem Markt: Das spielfreie, kippsteife Getriebe mit integrierter Drehmomentsensorik wurde auf der Automatica 2025 erstmals vorgestellt. (Bild: Harmonic Drive)")