:quality(80)/p7i.vogel.de/wcms/bf/b0/bfb00c4415647e3f6af55f6a28a99638/siemens-pave360-automotive-01-2500x1406v1.jpeg "irtuelle Zwillinge, KI-gestützte Tests und neue Validierungskonzepte: Die Fahrzeugentwicklung wird zunehmend softwaregetrieben – und gewinnt dadurch an Tempo. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/25/4c/254c93f7769ee82b8be8d24b8a971a1b/bild1-pgn-plus-anwendungsbild-07-04-2018-5760x3238v1.jpeg "Dank einer digitalen Lösung für die Werkstoffauswahl konnte Schunk neue emissionsreduzierende Ansätze ermitteln und den CO2-Ausstoß von Produkten reduzieren. (Bild: Schunk)")
:quality(80)/p7i.vogel.de/wcms/ed/b9/edb95e3cf7d170ef13d917b24d14064d/newsimage423895-4000x2249v1.jpeg "Empa-Forschende wollen beschädigte Brücken und andere Stahlkonstruktionen mithilfe des 3D-Metalldrucks reparieren. (Bild: Empa)")
:quality(80)/p7i.vogel.de/wcms/03/e3/03e358c7d85b64d95c4c2c972c7491f8/94048294.jpeg "Bei neuen Produktideen spielen die Kosten eine maßgebliche Rolle. Mit Design-to-Cost-Methoden lässt sich genau planen, wie Kosten am besten eingespart werden. (Bild: gemeinfrei)")
:quality(80)/p7i.vogel.de/wcms/89/c9/89c911ebddb1646a110a82e7e9900eae/manufacturing-20-26-20industrial-2-1450x816v1.png "Eine digitale Konstruktion schafft noch keinen digitalen Prozess. Manuelle Übergaben zwischen Konstruktion, Vertrieb und ERP verhindern dies und werden zunehmend zu Wachstumsproblemen. (Bild: Emporix)")
:quality(80)/p7i.vogel.de/wcms/6e/35/6e3563e715be749a19ceacd881c438b9/fachbeitrag-tda-inventor-pdm-2730x1536v1.png "Drei Tage für eine Variante, die sich hätte automatisieren lassen: Warum manuelle Konstruktionsprozesse heute keine Option mehr sind. (Bild: Lino GmbH)")
:quality(80)/p7i.vogel.de/wcms/10/76/10766ddc9c12e547d5fc8ebd4cc4cd7c/isi-6927-kopie-8256x4642v1.jpeg "Lang fit und selbstständig: Industrie und Wissenschaft entwickeln Gesundheitsassistenten der Zukunft. (Bild: Iris Maurer)")
:quality(80)/p7i.vogel.de/wcms/39/6a/396a08d40f5dd0af53a3acbbf726064c/mikroverkapselte-klebstoffe-kleben-pressefoto-1890x1329-1440x810v1.jpeg "Am Demonstrator lässt sich die Haftwirkung der Klebstoffkapseln direkt testen. (Bild: Fraunhofer IAP)")
:quality(80)/p7i.vogel.de/wcms/e3/0c/e30c5f8d7a48a57173d1b7f5b8ff1217/robot-20floaty-1024x576v1.jpeg "Der Flugroboter Floaty nutzt verstellbare Klappen, um Luftströmungen gezielt zu steuern und stabil in der Luft zu bleiben. (Bild: Max-Planck-Institut)")
:quality(80)/p7i.vogel.de/wcms/83/93/83935dca5289556988d7d2e9f2183d82/-sb-3254-3000x1687v1.jpeg "Würzburg im Oktober heißt: zwei Tage rund um die Frage, wie sich Produktentwicklung heute effizient und zukunftsfähig gestalten lässt. (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/e9/03/e90306f116f570daebed16b9684b9445/item-20fa-20schutzz-c3-a4une-20planen-20-bild2-1469x827v1.png "Digitale Konfiguratoren wie die von Item vereinfachen die Planung kompletter Schutzzäune über eine intuitive Benutzeroberfläche. (Bild: Item)")
:quality(80)/p7i.vogel.de/wcms/c9/47/c947857cac38244999f2b6f4e96a01de/thedigitalartist-ai-generated-8070000-3120x1754v1.jpeg "Die NIS-2-Richtlinie ist in Deutschland bereits am 6. Dezember 2025 in Kraft getreten – doch nur wenige Unternehmen haben die Vorgaben bislang umgesetzt. (Bild: TheDigitalArtist)")
:quality(80)/p7i.vogel.de/wcms/a0/03/a003d1d5ee83399f232303f7c50bd93b/geralt-statistics-4623842-4752x2672v1.jpeg "Erholung mit Risiken: Deutschlands Wirtschaft zwischen geopolitischer Unsicherheit und technologischem Aufschwung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/aa/e1/aae1d4890329b20e40f4ebbc782705c7/aussenhandel-saisonbereinigt-2048x1151v1.png "Im April 2026 sind die deutschen Exporte gegenüber März 2026 kalender- und saisonbereinigt um 0,9 Prozent und die Importe um 1,2 Prozent gestiegen. (Bild: Destatis)")
:quality(80)/p7i.vogel.de/wcms/0c/a8/0ca87f2101343b426f8a2efa3f7ed80b/adobestock-1979349822--c2-a9-20deni-20-e2-80-93-20stock-adobe-com-ki-generiert-4093x2304v1.jpeg "Ingenieure sind das entscheidende Bindeglied für KI im Praxiseinsatz. Sie bringen das essenzielle Wissen mit, KI-Modelle zu trainieren, einzuschätzen und richtig anzuwenden. (Bild: © deni – stock.adobe.com | KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/76/32/763233e84c4054d0c8634dad6c6141fc/adobestock-2035398302-2730x1536v1.jpeg "Wir zeigen, wie aus mechanischen Fächern und maritimen Lüftungssystemen der moderne Hochleistungsventilator wurde. (Bild: © Olga Ко – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/09/2a/092ad24dd4b603abc12e017024d5be85/digitalerzwillingjoseph-von-fraunhofer-20-282-29-6200x3489v1.jpeg "Auf der Hannover Messe 2026 konnten sich Besucher mit dem digitalen Zwilling von Joseph von Fraunhofer unterhalten – das Metaverse und KI machen es möglich. (Bild: Fraunhofer-Gesellschaft)")
:quality(80)/p7i.vogel.de/wcms/2f/2b/2f2b46d8cd0987790d053a0ecc434833/aumovio-pp-dtco-1-1772x997v1.jpeg "20 Jahre digitaler Tachograph: Wie sich das Gerät vom Kontrollgerät zum Datenhub im Güterverkehr entwickelt hat. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/bf/45/bf4523ff21e3add62ccd8390c5bfea7a/adobestock-726557427--c2-a9-20vladan-20-e2-80-93-20stock-adobe-com-ki-generiert-3580x2016v1.jpeg "Astronomie erforscht die Welt der Galaxien und versucht, Entstehung, Aufbau und Entwicklung des Universums zu erklären. (Bild: © Vladan – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/50/8c/508ccaa2f4a61a0fecf84fde16ba45aa/schrittmotor-nema-24-erklaerung-und-anwendungen-die-sie-kennen-solltenv1.jpeg "Die Parametrierung und Inbetriebnahme des Integrierten Motors ST NEMA24 von item Industrietechnik erfolgen komfortabel mit der Software item MotionSoftStepper (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/a1/64/a16493ce8f1e75a27e82aba33532b391/lineartechnik-einfach-erklaert-definition-vorteile-anwendungv1.jpeg "Lineartechnik kommt überall dort zum Einsatz, wo geführte Bewegungen entlang einer Achse erforderlich sind. Das item Linearsystem bietet die Basis für Einzelachsen, Synchronachsen sowie Mehrachsportale. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/45/8a/458add2ba48d38497829522cac80bbae/reinraum-fuer-pharma-medizintechnik-7-herausforderungen-und-wie-sie-sie-loesenv1.jpeg "Arbeiten unter Reinraumbedingungen: In der Pharma- und Medizintechnik sind kontrollierte Umgebungen eine zentrale Voraussetzung für sichere Produktionsprozesse. (Bild: item)")
Getriebe Kurzbauendes Gelenkmodul für Roboterhand und Humanoid
Die geschickte Anwendung innovativer Getriebetechnik macht es möglich, eine Roboterhand zu konstruieren, die der Bewegungsfähigkeit, der Statik und der Dynamik einer menschlichen Hand nahe kommt. Wird das Grundelement, aus dem der Roboter besteht, das Gelenkmodul, mechanisch verbessert, lässt sich durch geschickte Varianz und Größenmechanik ein ganzer Humanoid aufbauen.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/130700/130777/65.jpg "Neues Logo_550 pxl_maxon_logo_standard_rgb_50mm.jpg ()")
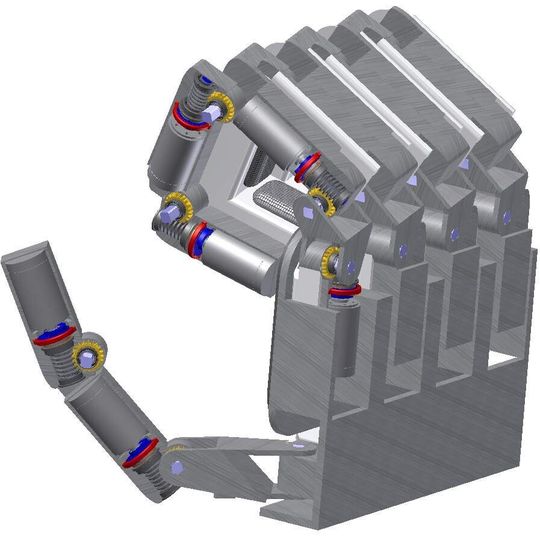
Bei der Entwicklung einer Roboterhand besteht die Grundaufgabe darin, möglichst effektiv die Drehbewegung eines leistungsstarken Elektromotors in eine erheblich verstärkte Drehbewegung des Gelenks zu wandeln. Dies lässt sich durch die Anwendung zweier hintereinander geschalteter, hochuntersetzender Getriebe erreichen: einem Exzenter- und einem Schneckengetriebe. Das Schneckengetriebe ist maßgleich mit einem zweiten Schneckengetriebe mit halb so großer Untersetzung (eingängig und zweigängig); dadurch kann ein schnelleres und ein stärkeres Gelenkmodul maßgleich gebaut werden.
Das Gelenkmodul ist äußerst kompakt und stärker als andere Modulen am Markt, die hauptsächlich in Roboterhänden angewendet werden. Dadurch, dass der Drehpunkt seitlich neben der Motor-Getriebe-Achse liegt, baut das Gelenk kürzer und lässt sich ohne Störkante besser zusammenklappen. Das Gelenk wird dadurch beweglicher als vergleichbare mit Kegelradgetrieben. Außerdem entspricht diese Bewegung den Gelenken des menschlichen Körpers, welche sich von der Strecklage in die fast zusammengefaltete Lage bewegen können.
Die verwendeten Getriebe sind nicht filigran, sondern robust und relativ hoch belastbar durch den konsequente Einsatz zweifach stabiler Kugellagerungen der Gelenkverbindungen. Weil die Getriebe einen hohen Wirkungsgrad haben und vollständig kugelgelagert sind, ist es möglich den Gesamtwirkungsgrad oberhalb 0,8 zu halten.
Zweifache Kugellagerung macht die Getriebe stabil
Ein zweigeteiltes Innengehäuse und darum ein ebenfalls zweigeteiltes Mantelgehäuse umschließen das Getriebe. In den Zwischenräumen zwischen Innengehäuse und Mantelgehäuse werden die Kabel zum leicht montierbaren Motor an den Seiten geführt. Aufgrund der konstruktiven Gestaltung – das Innengehäuse hat schraubbare Seitenwangen – ist es möglich, das Gelenkmodul in Ketten aneinander zu bauen und damit äußerst bewegliche Greifer-Gelenkketten mit bis zu vier Gliedern (lediglich die Kabelführung schränkt die Gliederzahl ein) hintereinander anzuordnen. Die Montage des Gelenkmoduls mit seitlich anzuschraubenden ineinander verschachtelten Mantelgehäusehälften ist einfach durchzuführen.
Die Kabelführung ist elegant und montagefreundlich gelöst
Die Kabelführung bei mehreren Gelenken ist elegant, montagefreundlich und funktionssicher gelöst. Das Mantelgehäuse hat Viertelkreisfahnen an den Seiten, die die Kabel abdecken und vor Quetschen sichern. Aufgrund der Modulbauweise lässt sich zum Beispiel eine Roboterhand gestalten, bei der alle Glieder das gleiche Grundmodul haben. Diese Hand ist in allen Gelenken elektromotorisch steuerbar.
Die Modulbauweise, die fertigungsgerechte Gestaltung und die Verwendung von handelsüblichen Norm-Getriebeelementen macht die Herstellung einfach und sehr preiswert. Integriert in das Gelenkmodul ist ein leistungsstarker Elektromotor mit Encoder. Damit ist das Modul in sehr kleinen Mikroschritten zu bewegen. Die technischen Daten des Gelenkmoduls:
- Abmessungen: Mittenabstand Drehgelenk: 50 mm;
- Kleinster Winkelschritt: 0,00045° (*0,0009°)(Theoretisch);
- Gelenkgeschwindigkeit: 100°/2 s (*100°/s) (Unter Nenn-Last); 100°/1,3 s (*100°/0,65 s) (ohne Last);
- Vollständig massiv kugelgelagert;
- Drehmoment des Gelenkes: 2,2 Nm (*1,155Nm)
- Haltemoment: 5,27 Nm (*2,635 Nm);
- Kraft Mitte Gelenk: 88 N (*46,2 N) (bei Getriebewirkungsgrad 80 %);
- Haltekraft Mitte Gelenk: 211 N (*105,5 N); *mit zweigängigem Schneckengetriebe
Das Gelenkmodul lässt sich zu einer Roboterhand kombinieren, die vollständig aus gleichen Gelenkmodulen aufgebaut ist. Die Finger bestehen aus vier Modulen und können damit genau wie die Finger einer Menschen-Hand bewegt werden. Das Modul an der Fingerkuppe erhält das zweigängige Schneckengetriebe. Dadurch wird es schneller und die Hand beweglicher.
(ID:38746970)
:quality(80)/p7i.vogel.de/wcms/a8/2d/a82d505becdb9d05c7631cf32a7f60f9/0131146680v2.jpeg "Bei Antrieben für beinartige und humanoide Roboter gehört das Rückdrehmoment zu den ausschlaggebenden Kriterien. (Bild: Balance Drive/Adobe Stock)")
:quality(80)/p7i.vogel.de/wcms/36/38/3638ef54ae63fa68b707fdec69162448/0127226490v2.jpeg "Beim Getränkehersteller Rivella reduzierten sich durch die automatisierte Formatverstellung an den Förderbändern und Abfüllstationen die Stillstandszeiten beim Produktwechsel. (Bild:Igus)")