:quality(80)/p7i.vogel.de/wcms/18/f6/18f66d31f5e85f6b65785d9975c7c206/2026-060-schaedigung-20metall-bild-202-1442x811v1.png "Unter Schubbelastung können Verunreinigungen in Form von steifen Partikeln dazu führen, dass das Volumen von Poren unter Verformung bis auf das Sechsfache steigt. (Bild: KIT)")
:quality(80)/p7i.vogel.de/wcms/25/4c/254c93f7769ee82b8be8d24b8a971a1b/bild1-pgn-plus-anwendungsbild-07-04-2018-5760x3238v1.jpeg "Dank einer digitalen Lösung für die Werkstoffauswahl konnte Schunk neue emissionsreduzierende Ansätze ermitteln und den CO2-Ausstoß von Produkten reduzieren. (Bild: Schunk)")
:quality(80)/p7i.vogel.de/wcms/ed/b9/edb95e3cf7d170ef13d917b24d14064d/newsimage423895-4000x2249v1.jpeg "Empa-Forschende wollen beschädigte Brücken und andere Stahlkonstruktionen mithilfe des 3D-Metalldrucks reparieren. (Bild: Empa)")
:quality(80)/p7i.vogel.de/wcms/1a/d9/1ad9efc8a86adc6031d22f7473e0d390/0132121730v1.jpeg "Nachdem es in den ersten vier Monaten 2026 für die deutsche Industrie in Sachen Auftragslage eher mau aussah, hat der Mai als Wonnemonat seinem Namen wohl Ehre gemacht. Analysten glauben nun zwar an mehr Sonne, doch die Wolken sind noch nicht verschwunden ... (Bild: Solarfans)")
:quality(80)/p7i.vogel.de/wcms/03/e3/03e358c7d85b64d95c4c2c972c7491f8/94048294.jpeg "Bei neuen Produktideen spielen die Kosten eine maßgebliche Rolle. Mit Design-to-Cost-Methoden lässt sich genau planen, wie Kosten am besten eingespart werden. (Bild: gemeinfrei)")
:quality(80)/p7i.vogel.de/wcms/89/c9/89c911ebddb1646a110a82e7e9900eae/manufacturing-20-26-20industrial-2-1450x816v1.png "Eine digitale Konstruktion schafft noch keinen digitalen Prozess. Manuelle Übergaben zwischen Konstruktion, Vertrieb und ERP verhindern dies und werden zunehmend zu Wachstumsproblemen. (Bild: Emporix)")
:quality(80)/p7i.vogel.de/wcms/fe/44/fe4429452f6e877efbde25279f384c71/konstrukteur-mit-cad-daten-am-pc-1536x864v1.png "CAD-Modelle und technische Dokumentationen ermöglichen eine schnelle Integration in Konstruktionen und reduzieren manuelle Arbeitsschritte. (Bild: BeeWaTec AG)")
:quality(80)/p7i.vogel.de/wcms/0d/83/0d8341a4a7aece08db829b730ba4578f/ids-case-study-dlr-header-3000x2000-copyright-20dlr-20-26-20ids-3000x1687v1.jpeg "Die Ensenso 3D-Kamera sorgt bei der Fertigung von Flugzeugkabinen für die hochpräzise Erfassung und Ausrichtung der Bohrpositionen. (Bild: Deutsches Zentrum für Luft- und Raumfahrt e.V & IDS Imaging Development Systems GmbH)")
:quality(80)/p7i.vogel.de/wcms/32/e5/32e5e6196aedd2e2b72941ad0196447f/00234972-full-b5000-5000x2811v1.jpeg "Dank energieautarker Systeme lassen sich Messdaten bei jedem Wetter an jedem Standort sicher erfassen. (Bild: Phoenix Contact)")
:quality(80)/p7i.vogel.de/wcms/83/93/83935dca5289556988d7d2e9f2183d82/-sb-3254-3000x1687v1.jpeg "Würzburg im Oktober heißt: zwei Tage rund um die Frage, wie sich Produktentwicklung heute effizient und zukunftsfähig gestalten lässt. (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/e9/03/e90306f116f570daebed16b9684b9445/item-20fa-20schutzz-c3-a4une-20planen-20-bild2-1469x827v1.png "Digitale Konfiguratoren wie die von Item vereinfachen die Planung kompletter Schutzzäune über eine intuitive Benutzeroberfläche. (Bild: Item)")
:quality(80)/p7i.vogel.de/wcms/c9/47/c947857cac38244999f2b6f4e96a01de/thedigitalartist-ai-generated-8070000-3120x1754v1.jpeg "Die NIS-2-Richtlinie ist in Deutschland bereits am 6. Dezember 2025 in Kraft getreten – doch nur wenige Unternehmen haben die Vorgaben bislang umgesetzt. (Bild: TheDigitalArtist)")
:quality(80)/p7i.vogel.de/wcms/a0/03/a003d1d5ee83399f232303f7c50bd93b/geralt-statistics-4623842-4752x2672v1.jpeg "Erholung mit Risiken: Deutschlands Wirtschaft zwischen geopolitischer Unsicherheit und technologischem Aufschwung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/aa/e1/aae1d4890329b20e40f4ebbc782705c7/aussenhandel-saisonbereinigt-2048x1151v1.png "Im April 2026 sind die deutschen Exporte gegenüber März 2026 kalender- und saisonbereinigt um 0,9 Prozent und die Importe um 1,2 Prozent gestiegen. (Bild: Destatis)")
:quality(80)/p7i.vogel.de/wcms/76/32/763233e84c4054d0c8634dad6c6141fc/adobestock-2035398302-2730x1536v1.jpeg "Wir zeigen, wie aus mechanischen Fächern und maritimen Lüftungssystemen der moderne Hochleistungsventilator wurde. (Bild: © Olga Ко – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/09/2a/092ad24dd4b603abc12e017024d5be85/digitalerzwillingjoseph-von-fraunhofer-20-282-29-6200x3489v1.jpeg "Auf der Hannover Messe 2026 konnten sich Besucher mit dem digitalen Zwilling von Joseph von Fraunhofer unterhalten – das Metaverse und KI machen es möglich. (Bild: Fraunhofer-Gesellschaft)")
:quality(80)/p7i.vogel.de/wcms/2f/2b/2f2b46d8cd0987790d053a0ecc434833/aumovio-pp-dtco-1-1772x997v1.jpeg "20 Jahre digitaler Tachograph: Wie sich das Gerät vom Kontrollgerät zum Datenhub im Güterverkehr entwickelt hat. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/bf/45/bf4523ff21e3add62ccd8390c5bfea7a/adobestock-726557427--c2-a9-20vladan-20-e2-80-93-20stock-adobe-com-ki-generiert-3580x2016v1.jpeg "Astronomie erforscht die Welt der Galaxien und versucht, Entstehung, Aufbau und Entwicklung des Universums zu erklären. (Bild: © Vladan – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/50/8c/508ccaa2f4a61a0fecf84fde16ba45aa/schrittmotor-nema-24-erklaerung-und-anwendungen-die-sie-kennen-solltenv1.jpeg "Die Parametrierung und Inbetriebnahme des Integrierten Motors ST NEMA24 von item Industrietechnik erfolgen komfortabel mit der Software item MotionSoftStepper (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/a1/64/a16493ce8f1e75a27e82aba33532b391/lineartechnik-einfach-erklaert-definition-vorteile-anwendungv1.jpeg "Lineartechnik kommt überall dort zum Einsatz, wo geführte Bewegungen entlang einer Achse erforderlich sind. Das item Linearsystem bietet die Basis für Einzelachsen, Synchronachsen sowie Mehrachsportale. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/45/8a/458add2ba48d38497829522cac80bbae/reinraum-fuer-pharma-medizintechnik-7-herausforderungen-und-wie-sie-sie-loesenv1.jpeg "Arbeiten unter Reinraumbedingungen: In der Pharma- und Medizintechnik sind kontrollierte Umgebungen eine zentrale Voraussetzung für sichere Produktionsprozesse. (Bild: item)")
Hydraulik Effizienz hydrostatischer Antriebe
Die Problematik der Kurvenstabilität löst Liebherr bei seinen Reachstackern mit zwei hydraulischen Einzelradantriebssystemen. Damit lassen sich unterschiedliche Antriebsmomente auf beiden Radpaaren einstellen, wodurch die Querkräfte auf die Lenkräder reduziert und die Positionsgenauigkeit erhöht werden.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/130700/130777/65.jpg "Neues Logo_550 pxl_maxon_logo_standard_rgb_50mm.jpg ()")
Der Reachstacker ist eine Maschine zum Stapeln von Containern. Aufgrund des begrenzten Raumes in Häfen und Terminals ist nur ein geringer Platz zum Wenden und zum Bewegen des Reachstackers vorhanden. Hohe Mobilität ist daher eine große Herausforderung an derartige Geräte. Die entsprechenden Fahrrichtungsänderungen werden mithilfe der gelenkten Hinterräder bewerkstelligt.
Derzeit existieren am Markt zwei unterschiedliche Konzepte zur Leistungsübertragung: Konventioneller Weise wird ein Differentialgetriebe in Kombination mit einem Drehmomentenwandler verwendet. Im Liebherr Reachstacker werden zwei hydraulische Einzelradantriebssysteme eingebaut.
Üblicherweise erfolgt die Leistungsverteilung zwischen den Vorderrädern über das Differential. Dies ist notwendig, da beide Vorderräder unterschiedliche Drehzahlen aufweisen können. Das Differential erzwingt prinzipiell dasselbe Antriebsmoment auf beide Radseiten. Durch Massenträgheiten der Maschine werden die Lenkräder während der Kurvenfahrt zusätzlichen Querkräften ausgesetzt. Der Betrag dieser Kräfte hängt ab von der Position und Größe der Last, der Position des geräteeigenen Schwerpunktes, dem Kurvenradius, der Fahr- und Lenkgeschwindigkeit und vielen anderen externen Einflüssen. Die Quersteifigkeit bestimmt im Wesentlichen die Lenkgenauigkeit und ist daher eine große Anforderung an derartig gesteuerte Fahrzeuge. Diese Radquersteifigkeit sollte daher möglichst hoch sein, um ein direktes Steuern des Gerätes aus der Fahrerkabine zu erreichen; geringe Steifigkeiten implizieren ein Wackeln und ungenaues Steuern des Gerätes.
Leistungsübertragung durch zwei getrennte hydrostatische Antriebe
Innerhalb des Liebherr Reachstackers erfolgt die Leistungsübertragung auf beide Radpaare durch zwei getrennte hydrostatische Antriebe. Daher kann das Antriebsmoment auf beide Radpaare beliebig verändert und eingestellt werden.
Das Moment wird idealerweise derart eingestellt, dass die Querkräfte auf die Lenkräder minimiert werden. Dadurch wird der Verschleiß und damit die Lebensdauer der Lenkräder stark erhöht. Zusätzlich wird das Handling des Gerätes erleichtert, da die Steuerung der Maschine direkt zur Lenkungsvorgabe durch den Fahrer über den Joystick erfolgt. In Abbildung 1 ist ein Vergleich zwischen der Verwendung eines Differentialgetriebes und einer Einzelradansteuerung dargestellt.

Wie man dort deutlich erkennen kann, wird für den Fahrer durch den hydrostatischen Einzelradantrieb die Steifigkeit der Lenkräder scheinbar erhöht; die Radquerkräfte werden reduziert. Außerdem wird der Kurvenradius kleiner, da der Querschlupf der Lenkräder verkleinert wird und damit das Gerät unmittelbar entlang der vorgegebenen Kurvenbahn fährt.
Vergleich zwischen dem hydrostatischen Getriebe und einem Drehmomentenwandler
Konventionell angetriebene Reachstacker verwenden einen Drehmomentenwandler in Kombination mit einem Differentialgetriebe. Aufgrund dieses Differentials haben die Geräte die bereits vorher erwähnten Nachteile. Zusätzlich ist die Energieeffizienz im Vergleich zu einem hydrostatischen Antriebskonzept unterschiedlich.
In Abbildung 2 ist die Energieeffizienz eines (einstufigen) Drehmomentenwandlers im Vergleich zu einem hydrostatischen Getriebe skizziert.

Der Drehmomentenwandler arbeitet in zwei Phasen – der Beschleunigungsphase und der gekuppelten Phase. Während der Beschleunigungsphase soll eine hohe Differenz zwischen der Antriebs- und Abtriebsdrehzahl vorhanden sein, um einen guten Wirkungsgrad zu erhalten. Nach erreichen eines Drehzahlverhältnisses nahe 1.0 kuppelt der Drehmomentenwandler ein; die Übertragung erfolgt über ein mechanisches Getriebe.
Im hydrostatischen Getriebe kann das Ansteuersignal der hydraulischen Pumpen und Motoren beliebig von der Antriebsdrehzahl der Verbrennungskraftmaschine verändert werden.
Der Prozess des Stapelns ist gekennzeichnet durch kurze Fahrdistanzen und vielen Beschleunigungs- und Verzögerungsphasen. Ein Fahren über lange Distanzen ist nicht sehr häufig anzutreffen. Der Wirkungsgrad in diesen Beschleunigungs- und Verzögerungsphasen ist bei hydrostatischen Getrieben besser als bei Drehmomentenwandlern. Zusätzlich kann beim hydrostatischen Getriebe die Antriebsdrehzahl der Verbrennungskraftmaschine aufgrund der Leistungsanforderung frei gewählt werden, welches einer Optimierung des gesamten Gerätes in Sachen Energiesparen und damit dem Treibstoffverbrauch entgegenkommt.
Bremsenergie wird zum Anheben des Auslegers verwendet
Ein hydrostatischer Antrieb ist prinzipiell für den Vierquadrantenbetrieb geeignet. Er kann dazu verwendet werden, die Maschine zu beschleunigen, zu verzögern und in beide Richtungen zu bewegen. Während der Verzögerungsphase muss die anfallende Bremsenergie durch andere Funktionen des Gerätes verwendet oder über zusätzliche hydraulische Aktuatoren abgebaut werden.
Mechanische Betriebsbremsen sind zusätzliche Einheiten, welche aufwendig angebracht werden müssten. Hydraulische Dissipationselemente können mit geringem Aufwand in das bestehende System integriert werden bzw. sind aufgrund anderer Funktionen des Reachstacker bereits vorhanden. Üblicherweise kommt es während den Verzögerungsphasen vor, dass der Ausleger des Reachstackers angehoben wird, um den Container im Stapel zu verstauen. Zur selben Zeit wird das Gerät aber auch abgebremst. Durch das gleichzeitige Abbauen der kinetischen Energie des Liebherr Reachstackers über das hydrostatische Getriebe und der Verwendung letzterer zum Anheben des Auslegers wird die Energieeffizienz des gesamten Gerätes verbessert und damit der Treibstoffverbrauch weiter reduziert.
Technische Realisierung des hydrostatischen Antriebes
Die Hydraulikpumpen der zwei geschlossenen Kreise werden direkt über die Verbrennungskraftmaschine angetrieben. Die beiden hydraulischen Motoren treiben über ein dreistufiges Planetengetriebe direkt die beiden Antriebsräderpaare an. Die Drehzahlen beider Hydraulikmotoren, der Verbrennungskraftmaschine und die vier Hydraulikdrücke werden sensortechnisch erfasst (Abbildung 3).
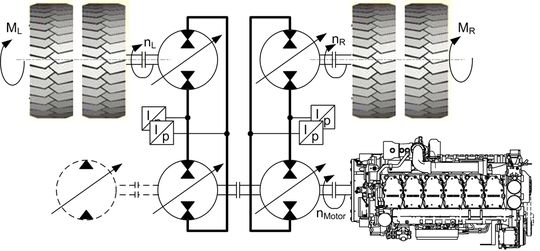
Zur Regelung des gesamten Konzeptes muss auch noch der Wunsch des Fahrers durch die Position eines Joysticks (Lenkwinkel und Fahrgeschwindigkeit) und der aktuelle Stellwinkel der Lenkräder erfasst werden. Alle diese Informationen werden, mithilfe von zusätzlichen numerischen Modellen, verwendet, um das Gerät zu regeln und zu steuern.
*Dipl.-Ing. Dr. techn. N. Krimbacher, Entwicklung System / Software, Liebherr-Werk Nenzing GmbH., Austria
(ID:257172)
:quality(80)/p7i.vogel.de/wcms/49/e9/49e97fcbc65fa45bca2576ec50ab1b7e/0127131321v2.jpeg "Moderne Spritzgießmaschinen gibt es mit elektrischen oder hydraulischen Aktuatoren - je nach Einsatzbereich. (Bild: © TongTa - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/fd/93/fd93bdda0e1b0967ffffcd2487c153d7/0132086888v2.jpeg "Die Landwirtschaft steht vor tiefgreifenden Veränderungen, die auch die Hydraulik der Maschinen betreffen. (Bild: Parker Hannfin)")