:quality(80)/p7i.vogel.de/wcms/bf/b0/bfb00c4415647e3f6af55f6a28a99638/siemens-pave360-automotive-01-2500x1406v1.jpeg "irtuelle Zwillinge, KI-gestützte Tests und neue Validierungskonzepte: Die Fahrzeugentwicklung wird zunehmend softwaregetrieben – und gewinnt dadurch an Tempo. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/25/4c/254c93f7769ee82b8be8d24b8a971a1b/bild1-pgn-plus-anwendungsbild-07-04-2018-5760x3238v1.jpeg "Dank einer digitalen Lösung für die Werkstoffauswahl konnte Schunk neue emissionsreduzierende Ansätze ermitteln und den CO2-Ausstoß von Produkten reduzieren. (Bild: Schunk)")
:quality(80)/p7i.vogel.de/wcms/ed/b9/edb95e3cf7d170ef13d917b24d14064d/newsimage423895-4000x2249v1.jpeg "Empa-Forschende wollen beschädigte Brücken und andere Stahlkonstruktionen mithilfe des 3D-Metalldrucks reparieren. (Bild: Empa)")
:quality(80)/p7i.vogel.de/wcms/03/e3/03e358c7d85b64d95c4c2c972c7491f8/94048294.jpeg "Bei neuen Produktideen spielen die Kosten eine maßgebliche Rolle. Mit Design-to-Cost-Methoden lässt sich genau planen, wie Kosten am besten eingespart werden. (Bild: gemeinfrei)")
:quality(80)/p7i.vogel.de/wcms/89/c9/89c911ebddb1646a110a82e7e9900eae/manufacturing-20-26-20industrial-2-1450x816v1.png "Eine digitale Konstruktion schafft noch keinen digitalen Prozess. Manuelle Übergaben zwischen Konstruktion, Vertrieb und ERP verhindern dies und werden zunehmend zu Wachstumsproblemen. (Bild: Emporix)")
:quality(80)/p7i.vogel.de/wcms/6e/35/6e3563e715be749a19ceacd881c438b9/fachbeitrag-tda-inventor-pdm-2730x1536v1.png "Drei Tage für eine Variante, die sich hätte automatisieren lassen: Warum manuelle Konstruktionsprozesse heute keine Option mehr sind. (Bild: Lino GmbH)")
:quality(80)/p7i.vogel.de/wcms/10/76/10766ddc9c12e547d5fc8ebd4cc4cd7c/isi-6927-kopie-8256x4642v1.jpeg "Lang fit und selbstständig: Industrie und Wissenschaft entwickeln Gesundheitsassistenten der Zukunft. (Bild: Iris Maurer)")
:quality(80)/p7i.vogel.de/wcms/39/6a/396a08d40f5dd0af53a3acbbf726064c/mikroverkapselte-klebstoffe-kleben-pressefoto-1890x1329-1440x810v1.jpeg "Am Demonstrator lässt sich die Haftwirkung der Klebstoffkapseln direkt testen. (Bild: Fraunhofer IAP)")
:quality(80)/p7i.vogel.de/wcms/e3/0c/e30c5f8d7a48a57173d1b7f5b8ff1217/robot-20floaty-1024x576v1.jpeg "Der Flugroboter Floaty nutzt verstellbare Klappen, um Luftströmungen gezielt zu steuern und stabil in der Luft zu bleiben. (Bild: Max-Planck-Institut)")
:quality(80)/p7i.vogel.de/wcms/83/93/83935dca5289556988d7d2e9f2183d82/-sb-3254-3000x1687v1.jpeg "Würzburg im Oktober heißt: zwei Tage rund um die Frage, wie sich Produktentwicklung heute effizient und zukunftsfähig gestalten lässt. (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/e9/03/e90306f116f570daebed16b9684b9445/item-20fa-20schutzz-c3-a4une-20planen-20-bild2-1469x827v1.png "Digitale Konfiguratoren wie die von Item vereinfachen die Planung kompletter Schutzzäune über eine intuitive Benutzeroberfläche. (Bild: Item)")
:quality(80)/p7i.vogel.de/wcms/c9/47/c947857cac38244999f2b6f4e96a01de/thedigitalartist-ai-generated-8070000-3120x1754v1.jpeg "Die NIS-2-Richtlinie ist in Deutschland bereits am 6. Dezember 2025 in Kraft getreten – doch nur wenige Unternehmen haben die Vorgaben bislang umgesetzt. (Bild: TheDigitalArtist)")
:quality(80)/p7i.vogel.de/wcms/a0/03/a003d1d5ee83399f232303f7c50bd93b/geralt-statistics-4623842-4752x2672v1.jpeg "Erholung mit Risiken: Deutschlands Wirtschaft zwischen geopolitischer Unsicherheit und technologischem Aufschwung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/aa/e1/aae1d4890329b20e40f4ebbc782705c7/aussenhandel-saisonbereinigt-2048x1151v1.png "Im April 2026 sind die deutschen Exporte gegenüber März 2026 kalender- und saisonbereinigt um 0,9 Prozent und die Importe um 1,2 Prozent gestiegen. (Bild: Destatis)")
:quality(80)/p7i.vogel.de/wcms/0c/a8/0ca87f2101343b426f8a2efa3f7ed80b/adobestock-1979349822--c2-a9-20deni-20-e2-80-93-20stock-adobe-com-ki-generiert-4093x2304v1.jpeg "Ingenieure sind das entscheidende Bindeglied für KI im Praxiseinsatz. Sie bringen das essenzielle Wissen mit, KI-Modelle zu trainieren, einzuschätzen und richtig anzuwenden. (Bild: © deni – stock.adobe.com | KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/76/32/763233e84c4054d0c8634dad6c6141fc/adobestock-2035398302-2730x1536v1.jpeg "Wir zeigen, wie aus mechanischen Fächern und maritimen Lüftungssystemen der moderne Hochleistungsventilator wurde. (Bild: © Olga Ко – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/09/2a/092ad24dd4b603abc12e017024d5be85/digitalerzwillingjoseph-von-fraunhofer-20-282-29-6200x3489v1.jpeg "Auf der Hannover Messe 2026 konnten sich Besucher mit dem digitalen Zwilling von Joseph von Fraunhofer unterhalten – das Metaverse und KI machen es möglich. (Bild: Fraunhofer-Gesellschaft)")
:quality(80)/p7i.vogel.de/wcms/2f/2b/2f2b46d8cd0987790d053a0ecc434833/aumovio-pp-dtco-1-1772x997v1.jpeg "20 Jahre digitaler Tachograph: Wie sich das Gerät vom Kontrollgerät zum Datenhub im Güterverkehr entwickelt hat. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/bf/45/bf4523ff21e3add62ccd8390c5bfea7a/adobestock-726557427--c2-a9-20vladan-20-e2-80-93-20stock-adobe-com-ki-generiert-3580x2016v1.jpeg "Astronomie erforscht die Welt der Galaxien und versucht, Entstehung, Aufbau und Entwicklung des Universums zu erklären. (Bild: © Vladan – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/50/8c/508ccaa2f4a61a0fecf84fde16ba45aa/schrittmotor-nema-24-erklaerung-und-anwendungen-die-sie-kennen-solltenv1.jpeg "Die Parametrierung und Inbetriebnahme des Integrierten Motors ST NEMA24 von item Industrietechnik erfolgen komfortabel mit der Software item MotionSoftStepper (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/a1/64/a16493ce8f1e75a27e82aba33532b391/lineartechnik-einfach-erklaert-definition-vorteile-anwendungv1.jpeg "Lineartechnik kommt überall dort zum Einsatz, wo geführte Bewegungen entlang einer Achse erforderlich sind. Das item Linearsystem bietet die Basis für Einzelachsen, Synchronachsen sowie Mehrachsportale. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/45/8a/458add2ba48d38497829522cac80bbae/reinraum-fuer-pharma-medizintechnik-7-herausforderungen-und-wie-sie-sie-loesenv1.jpeg "Arbeiten unter Reinraumbedingungen: In der Pharma- und Medizintechnik sind kontrollierte Umgebungen eine zentrale Voraussetzung für sichere Produktionsprozesse. (Bild: item)")
Antriebstechnik Bürstenlose Motoren ansteuern – ohne Sensor
In vielen Anwendungen wäre es von Vorteil, wenn man einen bürstenlosen Motor ohne Sensoren betreiben könnte. Und tatsächlich gibt es hier verschiedene Möglichkeiten.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/130700/130777/65.jpg "Neues Logo_550 pxl_maxon_logo_standard_rgb_50mm.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/20800/20842/65.jpg "Logo_42mm.JPG ()")
Um einen bürstenlosen Motor anzutreiben, braucht es eine Steuerelektronik für die präzise Kommutierung. Das funktioniert aber nur, wenn die Steuerelektronik stets „weiß“, in welcher Position sich der Rotor befindet. Klassischerweise liefern im Motor verbaute Sensoren – beispielsweise Hallsensoren – diese Informationen. Doch es geht auch anders. Sensorlose Ansteuerungsverfahren verwenden direkt Strom- und Spannungsinformation aus dem Motor zur Bestimmung der Rotorlage. Aus der Veränderung der Rotorposition kann die Geschwindigkeit hergeleitet werden, welche zur zusätzlichen Drehzahlregelung verwendet werden kann. Höherentwickelte sensorlose Ansteuerungen können sogar den Strom (Drehmoment) und die Position regeln. Durch das Weglassen von Sensoren ergeben sich Vorteile: tiefere Kosten und Platzersparnis. Denn Kabel, Stecker, aber auch empfindliche elektronische Schaltkreise werden überflüssig. Die sensorlosen Regler von Maxon benützen drei Grundprinzipien, die speziell auf die Maxon-BLDC-Motoren abgestimmt sind.
:quality(80)/images.vogel.de/vogelonline/bdb/1536200/1536276/original.jpg "(Maxon)")
:quality(80)/images.vogel.de/vogelonline/bdb/1536200/1536277/original.jpg "(Maxon)")
:quality(80)/images.vogel.de/vogelonline/bdb/1536200/1536278/original.jpg "(Maxon)")
:quality(80)/images.vogel.de/vogelonline/bdb/1536200/1536279/original.jpg "(Maxon)")
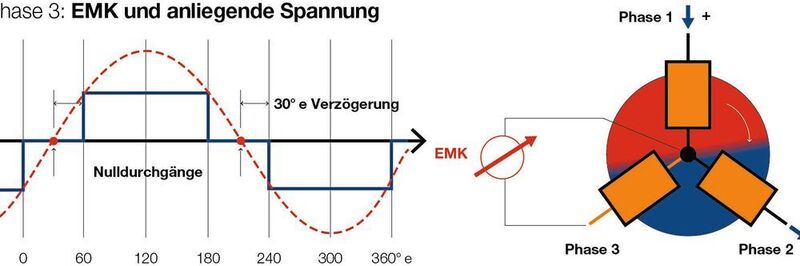
EMK-Methode mit Nulldurchgang
Die EMK-Methode mit Bestimmung des Nulldurchgangs verwendet die induzierte Spannung (oder EMK) in der nichtbestromten Phase bei Blockkommutierung. Der Nulldurchgang findet in der Mitte des Kommutierungsintervalls statt. Aus den vorhergehenden Kommutierungsschritten kann die Zeitverzögerung zum nächsten Kommutierungspunkt abgeschätzt werden.
Die EMK-Methode mit Nulldurchgang funktioniert nur bei genügend hoher Drehzahl – im Stillstand verschwindet die EMK. Der Anlauf des Motors benötigt einen speziellen Anlaufprozess ähnlich einer Schrittmotorsteuerung und muss separat eingestellt werden. Die eigentliche sensorlose Kommutierung ist erst ab Motordrehzahlen von 500–1000 Umdrehungen pro Minute möglich. Zur Drehzahlregelung wird die Frequenz der Kommutierungsschritte verwendet. Die Dynamik ist aufgrund der beschränkten Feedbackinformation limitiert, kann aber durch Integration von Schätzmethoden im Regelalgorithmus (Beobachter, Kalman-Filter …) verbessert werden. Die EMK-Methode mit Nulldurchgang hat aber auch Vorteile. Grundsätzlich funktioniert sie mit allen bürstenlosen Motorbauarten. Sie ist robust, kosteneffektiv und wird in vielen Standardprodukten verwendet, wie im Maxon-ESCON-Module 50/4 EC-S.
Beobachter-basierte EMK-Methode
Beobachter- oder Modell-basierte EMK-Methoden benutzen Informationen aus dem Motorstrom, um die Rotorlage und die Drehzahl herzuleiten. Der Modell-basierte Ansatz ergibt eine viel höhere Auflösung der Rotorposition. Damit ist Sinuskommutierung (oder FOC, feldorientierte Regelung) möglich mit all ihren Vorteilen: höherer Wirkungsgrad, kleinere Erwärmung, weniger Vibrationen und Geräusche. Allerdings benötigt auch die Beobachter-basierte EMK-Methode eine Mindestdrehzahl von einigen hundert min-1, um gut zu funktionieren.
Die auf der magnetischen Anisotropie basierenden Methoden leiten die Rotorlage aus der Motorinduktivität her, welche minimal ist, wenn die magnetischen Flüsse von Stator und Rotor im Rückschluss parallel sind.
Magnetische Anisotropie-Methoden
Dazu werden kurze Strompulse verwendet, die aber keine Motorbewegung verursachen. Verglichen mit den EMK-basierten Verfahren funktioniert diese Methode auch im Stillstand oder bei sehr tiefen Drehzahlen und erlaubt Sinuskommutierung. Die gemessenen Signale sind stark vom Motortyp abhängig. Der Bestimmung der Rotorlage liegt ein Motormodell zugrunde, welches für jeden Motor parametriert und angepasst werden muss. Controller auf Basis von magnetischer Anisotropie sind deshalb hochspezifische Produkte – einfach „plug-and-play“ geht nicht. Der Rechenaufwand zur Evaluation der Rotorposition beschränkt die maximal möglichen Drehzahlen.
Warum sensorlose Ansteuerung?
In preissensitiven Anwendungen kann die Verwendung von sensorlosen Motoren die Kosten senken. Hallsensoren, Encoder, Kabel und Stecker fallen weg. Typische Anwendungen in diesem Bereich sind Lüfter, Pumpen, Scanner, Fräser, Bohrer und andere hochdrehende Anwendungen mit eher tiefer Regelperformance und wo ein kontrollierter Anlauf nicht kritisch ist. Bei hoher Stückzahl ist eine kundenspezifische Anpassung des EMK-basierten Reglers sinnvoll.
Kostenersparnis ist nicht der einzige Grund, sich für eine sensorlose Ansteuerung zu entscheiden. Anwendungen wie Tür- oder Bike-Antriebe benötigen eine hohe Regelqualität. Eine ruckfreie Motoransteuerung ab Drehzahl null ist wichtig, aber auch eine hohe Dynamik und Sinuskommutierung zur Geräuschvermeidung. Dies alles soll ohne die Verwendung eines teuren Encoders realisiert werden. In den letzten Jahren haben sich dazu hochwertige sensorlose Ansteuerungen basierend auf der Anisotropie-Methode etabliert. Zum Beispiel die neue High-Performance-Sensorless-Control-Steuerung (HPSC) von Maxon (siehe Kasten). Der Engineering-Aufwand zur Anpassung der Modellparameter rechtfertigt sich allerdings erst ab Stückzahlen von einigen hundert.
Vorteilhaft auch in rauen Umgebungen
Eine sensorlose Ansteuerung kann auch nötig sein in Situationen, wo empfindliche Sensorelektronik beim Motor vermieden werden muss. Man denke an Anwendungen bei sehr hohen oder tiefen Umgebungstemperaturen, Reinigungs- und Sterilisationsmethoden im medizinischen Umfeld, aber auch an ionisierende Strahlung im Weltraum, in Kernanlagen oder in der Medizin. Die reduzierte Anzahl an Motoranschlüssen erleichtert die Integration bei engen Platzverhältnissen.
Die benötigte Regelgüte ist je nach Anwendung verschieden. Welche sensorlose Methode besser passt, muss von Fall zu Fall entschieden werden – zum Beispiel eine hohe Drehzahl in Dental-Handgeräten zum Bohren und Schleifen oder eher tiefe Drehzahlen und geregelte Drehmomente zum Fixieren von Schrauben in der Chirurgie.
Drei gute Gründe für die Technik
Drei Hauptgründe sprechen für eine sensorlose Ansteuerung: Kostenersparnis, Platzersparnis und feindliche Umgebung für Sensoren. Die EMK-Methode mit Bestimmung des Nulldurchgangs ist weit verbreitet in kostensensitiven Anwendungen, die bei hohen Drehzahlen laufen. Sensorlose Ansteuerung ab Stillstand und bei tiefen Drehzahlen verlangt nach höher entwickelten Methoden. Der Aufwand zur Implementierung ist größer und schließt Modellbildung und Parametrisierung ein. Kostenersparnis ist eher zweitrangig. Die feldorientierte Regelung ergibt einen höheren Wirkungsgrad und weniger Erwärmung sowie ein tieferes Vibrations- und Geräuschniveau. Das sind alles Vorteile, welche besonders in medizinischen Handgeräten zum Tragen kommen. (ud)
Hannover Messe 2019: Halle 15, Stand D09
:quality(80)/images.vogel.de/vogelonline/bdb/1461900/1461924/original.jpg "Für den Antrieb eines Roboter-Hüftgelenkes entwickelte Maxon Motor eine kundenspezifische Gesamtlösung. (Maxon )")
Mechatronische Antriebslösung
Vom Motor zum Antriebssystem
:quality(80)/images.vogel.de/vogelonline/bdb/1484300/1484339/original.jpg "Wer den Wirkungsgrad eines Antriebssystems optimieren will, sollte zuerst den Blick auf die Mechanik werfen. (©Sashkin - stock.adobe.com)")
Wirkungsgrad
So steigern Sie den Wirkungsgrad von Antriebskomponenten
:quality(80)/images.vogel.de/vogelonline/bdb/1502300/1502304/original.jpg "Die Hannover Messe 2019 findet vom 1. bis 5. April 2019 statt. (Hannover Messe)")
Update: Hannover Messe 2019
Alles, was Sie zur Hannover Messe 2019 wissen müssen
* *Urs Kafader ist Leiter der technischen Ausbildung bei Maxon Motor.
(ID:45758295)
:quality(80)/p7i.vogel.de/wcms/b5/86/b586459c6e5844f09d651eeb98c7cdf7/0127928583v2.jpeg "Der Frequenzumrichter i650 Motec bietet in Kombination mit dem Synchronmotor m550/m650 eine leistungsstarke und energieeffiziente Lösung. (Bild: Lenze)")
:quality(80)/p7i.vogel.de/wcms/1c/05/1c05d328c54b711cc9a69bbc65574728/0126213187v2.jpeg "Ein Antriebs der bereits die notwendige Intelligenz mitbringt wie der Romotion von Rotek vereinfacht übergeordnete Steuerungen oder macht sie sogar überflüssig. (Bild: Rotek)")