:quality(80)/p7i.vogel.de/wcms/18/c0/18c07c769db4df3a950fb887719265dc/general-fusion-lm26-7008x3940v1.jpeg "General Fusion nutzt multiphysikalische Simulationen, um das Verhalten seiner Fusionsdemonstrationsanlage zu analysieren und zu optimieren. (Bild: General Fusion)")
:quality(80)/p7i.vogel.de/wcms/d9/e0/d9e0a52ace6a70cb7f40b6647ea634a7/p90642837-highres-bmw-group-and-mistra-2573x1447v1.jpeg "BMW kann auf einen historischen Datensatz aus virtuellen Crashsimulationen von mehr als einem Petabyte zugeifen und damit sein industrielles KI-Modell trainieren. (Bild: BMW)")
:quality(80)/p7i.vogel.de/wcms/eb/0e/eb0ebbc439b9156460b875564800346b/pexels-markusspiske-9858904-1613x908v1.jpeg "Der Jahresbericht des Deutschen Patent- und Markenamts (DPMA) zeigt eine deutlich steigende Dynamik bei Patentanmeldungen, insbesondere in der Batterietechnik. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/89/c9/89c911ebddb1646a110a82e7e9900eae/manufacturing-20-26-20industrial-2-1450x816v1.png "Eine digitale Konstruktion schafft noch keinen digitalen Prozess. Manuelle Übergaben zwischen Konstruktion, Vertrieb und ERP verhindern dies und werden zunehmend zu Wachstumsproblemen. (Bild: Emporix)")
:quality(80)/p7i.vogel.de/wcms/6e/35/6e3563e715be749a19ceacd881c438b9/fachbeitrag-tda-inventor-pdm-2730x1536v1.png "Drei Tage für eine Variante, die sich hätte automatisieren lassen: Warum manuelle Konstruktionsprozesse heute keine Option mehr sind. (Bild: Lino GmbH)")
:quality(80)/p7i.vogel.de/wcms/13/b3/13b3ddeb15a89dd2312ebfcf5a137edd/0131474896v2.jpeg "Frustrierend: Rund 40 Prozent der Zeit von Elektrokonstrukteuren entfällt auf die Suche nach Komponenten, die Erstellung und Pflege von Dokumentation sowie die Korrektur wiederkehrender Fehler. Hier kann künstliche Intelligenz Entlastung schaffen. (Bild: WSCAD GmbH)")
:quality(80)/p7i.vogel.de/wcms/35/21/35215b04eac3455313ca51b72792c041/max-6-1080x608v1.png "IPF Electronic hat für das Unternehmen und alle Mitarbeiter eigene verbindliche Richtlinien für die Nutzung Künstlicher Intelligenz erarbeitet. (Bild: IPF Electronic)")
:quality(80)/p7i.vogel.de/wcms/bb/3a/bb3a3e3e2325113eb1ed97c5002a202f/-28c-29designbyfreepik2-5376x3022v1.jpeg "Humanoide Roboter könnten bereits in den kommenden zehn Jahren zu einem der wichtigsten Werkzeuge der modernen Industrie- und Dienstleistungsgesellschaft werden. (Bild: FreePik2)")
:quality(80)/p7i.vogel.de/wcms/3e/1e/3e1e17bf8bae7e5208cc9d3d6966d2b4/nick-the-photographer-water-5967218-1920-1920x1080v1.jpeg "Die IP-Schutzart macht unter anderem deutlich, wie stark ein Produkt vor Berührung mit Spritzwasser geschützt ist. (Bild: Nick_the_Photographer)")
:quality(80)/p7i.vogel.de/wcms/e9/03/e90306f116f570daebed16b9684b9445/item-20fa-20schutzz-c3-a4une-20planen-20-bild2-1469x827v1.png "Digitale Konfiguratoren wie die von Item vereinfachen die Planung kompletter Schutzzäune über eine intuitive Benutzeroberfläche. (Bild: Item)")
:quality(80)/p7i.vogel.de/wcms/c9/47/c947857cac38244999f2b6f4e96a01de/thedigitalartist-ai-generated-8070000-3120x1754v1.jpeg "Die NIS-2-Richtlinie ist in Deutschland bereits am 6. Dezember 2025 in Kraft getreten – doch nur wenige Unternehmen haben die Vorgaben bislang umgesetzt. (Bild: TheDigitalArtist)")
:quality(80)/p7i.vogel.de/wcms/5f/3d/5f3ddce3220ba9afb5c44823eec66211/mac0010563-rgb-3344x1882v1.jpeg "Das Sensorsystem USi-Safety umfasst zwei Ultraschallwandler zum Anschluss an zwei unabhängige Kanäle, die jeweils EN ISO 13849 Kategprie 3 PL d erfüllen. (Bild: Pepperl+Fuchs)")
:quality(80)/p7i.vogel.de/wcms/a0/03/a003d1d5ee83399f232303f7c50bd93b/geralt-statistics-4623842-4752x2672v1.jpeg "Erholung mit Risiken: Deutschlands Wirtschaft zwischen geopolitischer Unsicherheit und technologischem Aufschwung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/aa/e1/aae1d4890329b20e40f4ebbc782705c7/aussenhandel-saisonbereinigt-2048x1151v1.png "Im April 2026 sind die deutschen Exporte gegenüber März 2026 kalender- und saisonbereinigt um 0,9 Prozent und die Importe um 1,2 Prozent gestiegen. (Bild: Destatis)")
:quality(80)/p7i.vogel.de/wcms/0c/a8/0ca87f2101343b426f8a2efa3f7ed80b/adobestock-1979349822--c2-a9-20deni-20-e2-80-93-20stock-adobe-com-ki-generiert-4093x2304v1.jpeg "Ingenieure sind das entscheidende Bindeglied für KI im Praxiseinsatz. Sie bringen das essenzielle Wissen mit, KI-Modelle zu trainieren, einzuschätzen und richtig anzuwenden. (Bild: © deni – stock.adobe.com | KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/09/2a/092ad24dd4b603abc12e017024d5be85/digitalerzwillingjoseph-von-fraunhofer-20-282-29-6200x3489v1.jpeg "Auf der Hannover Messe 2026 konnten sich Besucher mit dem digitalen Zwilling von Joseph von Fraunhofer unterhalten – das Metaverse und KI machen es möglich. (Bild: Fraunhofer-Gesellschaft)")
:quality(80)/p7i.vogel.de/wcms/2f/2b/2f2b46d8cd0987790d053a0ecc434833/aumovio-pp-dtco-1-1772x997v1.jpeg "20 Jahre digitaler Tachograph: Wie sich das Gerät vom Kontrollgerät zum Datenhub im Güterverkehr entwickelt hat. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/bf/45/bf4523ff21e3add62ccd8390c5bfea7a/adobestock-726557427--c2-a9-20vladan-20-e2-80-93-20stock-adobe-com-ki-generiert-3580x2016v1.jpeg "Astronomie erforscht die Welt der Galaxien und versucht, Entstehung, Aufbau und Entwicklung des Universums zu erklären. (Bild: © Vladan – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/bc/49/bc4957f73a884d8ee1356914659cf2f4/adobestock-325234002--c2-a9-20karyna-20-e2-80-93-20stock-adobe-com-5490x3087v1.jpeg "Riesenräder sind mehr als eine Attraktion, sie sind ein Symbol für technologischen Fortschritt. (Bild: © Karyna – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/50/8c/508ccaa2f4a61a0fecf84fde16ba45aa/schrittmotor-nema-24-erklaerung-und-anwendungen-die-sie-kennen-solltenv1.jpeg "Die Parametrierung und Inbetriebnahme des Integrierten Motors ST NEMA24 von item Industrietechnik erfolgen komfortabel mit der Software item MotionSoftStepper (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/a1/64/a16493ce8f1e75a27e82aba33532b391/lineartechnik-einfach-erklaert-definition-vorteile-anwendungv1.jpeg "Lineartechnik kommt überall dort zum Einsatz, wo geführte Bewegungen entlang einer Achse erforderlich sind. Das item Linearsystem bietet die Basis für Einzelachsen, Synchronachsen sowie Mehrachsportale. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/45/8a/458add2ba48d38497829522cac80bbae/reinraum-fuer-pharma-medizintechnik-7-herausforderungen-und-wie-sie-sie-loesenv1.jpeg "Arbeiten unter Reinraumbedingungen: In der Pharma- und Medizintechnik sind kontrollierte Umgebungen eine zentrale Voraussetzung für sichere Produktionsprozesse. (Bild: item)")
Fachkräftemangel Roboter soll fehlende Fachkräfte kurzfristig ersetzen
Fachkräfte, die kurzfristig ausfallen, stellen mittelständische Unternehmen oft vor große Probleme. Ein mobiler Roboter soll jetzt an Werkzeugmaschinen einspringen können und Fachkräfte ersetzen.
Anbieter zum Thema
:fill(fff,0)/p7i.vogel.de/companies/5d/92/5d92eae683273/lenord-bauer.jpg "Lenord_Bauer.jpg (Lenord, Bauer & Co. GmbH)")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/46400/46464/65.jpg "AA_Logo_Quadrat.jpg ()")
Vor allem mittelständischen Unternehmen bereitet der Fachkräftemangel große Probleme. Bei längeren Ausfällen durch Krankheit, Elternzeit oder bei kurzfristigen Arbeitsspitzen ist es oft schwer, die fehlende Fachkraft kurzfristig zu ersetzen. Dafür hat das Fraunhofer-Institut für Werkzeugmaschinen und Umformtechnik IWU zusammen mit dem Lösungsanbieter Industrie-Partner den „Robo Operator“ entwickelt: Ein mobiler Roboter, der autonom Werkzeugmaschinen bedienen kann.
Ein autonomer Roboter für 1.000 Euro pro Woche
Der Robo Operator ist bereits im Einsatz und kann von Unternehmen gebucht werden. Der Fokus von Robo liegt nicht darauf, die Fachkraft dauerhaft zu ersetzen, sondern von Unternehmen für eine bestimmte Zeit ausgeliehen zu werden. Auf Wunsch kann der Roboter aber auch dauerhaft erworben werden. Obwohl für KMUs entwickelt, gibt es inzwischen auch einige Anfragen von Großunternehmen.
Als Basismietpreis berechnet IP etwa 1.000 Euro pro Woche, 3.500 Euro pro Monat und pro Quartal 8.000 Euro. Dazu kommen noch Kosten für Anlieferung, Einrichtung und mehr.
Was der Robo Operator kann
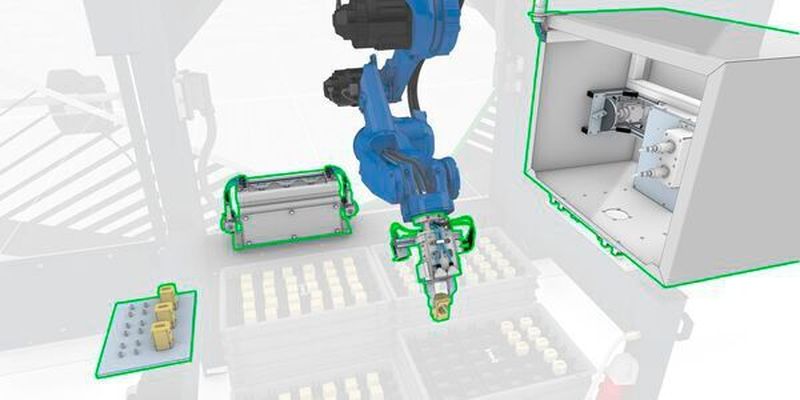
Der Robo Operator besteht aus einer manuell verfahrbaren Zelle mit eingebautem Industrieroboter, einem integrierten Werkstückpuffersystem und einem Kamerasystem. Der Robo Operator wird direkt vor die zu bedienende Werkzeugmaschine gestellt und arbeitet dann eigenständig genau die Arbeitsschritte ab, die sonst von der Fachkraft ausgeführt werden. Er kann beispielsweise die Maschine be- und entladen, das Spannsystem steuern, entrgraten oder das Programm starten und beenden.
:quality(80)/images.vogel.de/vogelonline/bdb/1741200/1741243/original.jpg "(IP)")
:quality(80)/images.vogel.de/vogelonline/bdb/1741700/1741703/original.jpg "(IP)")
:quality(80)/images.vogel.de/vogelonline/bdb/1741700/1741704/original.jpg "(IP)")
:quality(80)/images.vogel.de/vogelonline/bdb/1741700/1741705/original.jpg "(IP)")
Und das funktioniert so: Der Robo erkennt seine Position vor der Werkzeugmaschine mithilfe eines integrierten Kamerasystems. Damit kann er z.B. auch die Signalsäule richtig interpretieren, die den Maschinenzustand anzeigt. Er kann mit verschiedenen Greifern arbeiten oder für spezielle Bearbeitungsschritte ausgerüstet werden. Erlernte Fähigkeiten speichert Robo in seiner Datenbank ab, sodass er Arbeitsschritte wiederholen kann.
Robo kann Umgebung interpretieren
Damit Robo Aufgaben lernt, muss er nicht mit der Werkzeugmaschine über Hard- oder Software gekoppelt werden. Die Wissenschaftler des Fraunhofer IWU wollten dem Roboter die nötigen kognitiven Fähigkeiten mitgeben, dass er aus seiner Umgebung die richtigen Schlüsse ziehen kann. Dazu entwickelten sie die Steuerungssoftware für die Automatisierung und Auswertung der Bildinformationen.
Ein fähigkeitsbasiertes Steuerungskonzept kann die Programmabläufe flexibel zusammenstellen. Und die Analysealgorithmen sind so entwickelt, dass sie unter verschiedenen Lichtbedingungen funktionieren.
(ID:46838577)
:quality(80)/p7i.vogel.de/wcms/b6/73/b6737071d2dc0012a798aeb8a2c62253/0126366046v1.jpeg "Kisssoft hat in seinem neuesten Release die Visualisierung verbessert, um den Design- und Auslegungsprozess zu optimieren. (Bild: KISSsoft AG)")
:quality(80)/p7i.vogel.de/wcms/fd/4a/fd4afd3c87ca70bb45667beac46a95f3/0128773266v2.jpeg "Der Mariow-Roboter schweißt autonom eine Kehlnaht unter Wasser. (Bild: MARIOW Team / DFKI)")