:quality(80)/p7i.vogel.de/wcms/17/91/17914750ffc7ba7a25184e575a16b673/adobestock-58742161--c2-a9-20doc-20rabe-20media-20-e2-80-93-20stock-adobe-com-6000x3377v1.jpeg "Wir haben Tipps & Tricks aus dem Bereich Digital Engineering gesammelt, um Konstrukteuren und Entwicklern die Arbeit zu erleichtern. (Bild: © DOC RABE Media – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/d1/aa/d1aa90fe57c7e869fad955f6fa5869a9/yamu-jay-green-energy-9062790-5376x3022v1.jpeg "Die neue Toolbox richtet sich an kleine und mittlere Unternehmen (KMU), Start-ups sowie an Entwicklungs- und Konstruktionsabteilungen, die zirkuläre Anforderungen systematisch in ihre Produkte integrieren möchten. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/99/3f/993f3507a25b1b01acdc1dfa064df03b/1-20--20spritzguss-c-uni-a-20grunwald-edit-4671x2627v1.jpeg "Nils Meyer (rechts) und Projekt-Mitarbeiter Julian Greif entwickeln ein KI-Tool, um die Bauteilentwicklung im Spritzguss zu optimieren. (Bild: Universität Augsburg)")
:quality(80)/p7i.vogel.de/wcms/65/44/65449128817fa1f9a15a6dcadb9d2a3e/adobestock-690807704--c2-a9-20krungchingpixs-20-e2-80-93-20stock-adobe-com-6718x3780v1.jpeg "Chatten reicht nicht: Industrielle KI muss Physik verstehen, um im Engineering-Alltag zu bestehen. (Bild: © krungchingpixs – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ca/52/ca52419eb80bccebeaf6fd29dd30717d/geralt-time-2676366-3226x1813v1.jpeg "Was ein Bauteil wirklich kostet, wissen viele Konstrukteure erst Wochen nach der Fertigung der Bauteile. Wie sich diese Lücke schließen lässt, erfahren Teilnehmer auf dem Konstruktionsleiter-Forum 2026. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/87/c2/87c2b4e3161b9d7ff5816852a1f05a64/0132403102v1v1.jpeg "(Bild: Vogel Professional Education)")
:quality(80)/p7i.vogel.de/wcms/c3/0d/c30daafe0cdf3fcc3d50509e60be8989/bild-1-925x520v1.jpeg "Für eine Förderstrecke für Mozzarella-Verpackungen verwendet Zott das Kettenfördersystem Varioflow Plus von Bosch Rexroth mit Komponenten aus Edelstahl. (Bild: Heldele Automation )")
:quality(80)/p7i.vogel.de/wcms/11/96/11960b1d2f221b89b8fe9bf1de6e367e/franke-drehverbindung-materialmix-frei-1920x1080v1.png "Mögliche Werkstoffe für die Lagergehäuse von Drahtwälzlagern (von links im Uhrzeigersinn): 3D-gedruckte Struktur, Karbon, Stahl, Kunststoff, Messing, Aluminium, Bronze, Edelstahl (Bild: Franke)")
:quality(80)/p7i.vogel.de/wcms/27/9b/279bdbe29d08f90d38d3f330a8544de0/rollon-hvc-mg-rgb-1616x908v1.jpeg "Die neue MG-Version der HVC-Kugelschienenführung mit Vollauszug hat eine höhere Tragzahl als die bisher verfügbaren Varianten der Baureihe. (Bild: Rollon)")
:quality(80)/p7i.vogel.de/wcms/d8/d4/d8d4786533658531dd7f5d383c020f54/-sb-3254-3000x1687v1.jpeg "Auch 2026 heißt es in Würzburg wieder „Herzlich willkommen\" für Konstruktions- und Entwicklungsleiter aus ganz Deutschland. (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/83/93/83935dca5289556988d7d2e9f2183d82/-sb-3254-3000x1687v1.jpeg "Würzburg im Oktober heißt: zwei Tage rund um die Frage, wie sich Produktentwicklung heute effizient und zukunftsfähig gestalten lässt. (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/e9/03/e90306f116f570daebed16b9684b9445/item-20fa-20schutzz-c3-a4une-20planen-20-bild2-1469x827v1.png "Digitale Konfiguratoren wie die von Item vereinfachen die Planung kompletter Schutzzäune über eine intuitive Benutzeroberfläche. (Bild: Item)")
:quality(80)/p7i.vogel.de/wcms/16/00/1600883e04215e4e3863e4a941e364c0/newsimage424941-2000x1124v1.jpeg "Mit Kassandra tauchen Teams in eine Thriller‑Story ein, lösen unter Zeitdruck KI‑Challenges. (Bild: Fraunhofer FIT)")
:quality(80)/p7i.vogel.de/wcms/1a/d9/1ad9efc8a86adc6031d22f7473e0d390/0132121730v1.jpeg "Nachdem es in den ersten vier Monaten 2026 für die deutsche Industrie in Sachen Auftragslage eher mau aussah, hat der Mai als Wonnemonat seinem Namen wohl Ehre gemacht. Analysten glauben nun zwar an mehr Sonne, doch die Wolken sind noch nicht verschwunden ... (Bild: Solarfans)")
:quality(80)/p7i.vogel.de/wcms/a0/03/a003d1d5ee83399f232303f7c50bd93b/geralt-statistics-4623842-4752x2672v1.jpeg "Erholung mit Risiken: Deutschlands Wirtschaft zwischen geopolitischer Unsicherheit und technologischem Aufschwung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/aa/e1/aae1d4890329b20e40f4ebbc782705c7/aussenhandel-saisonbereinigt-2048x1151v1.png "Im April 2026 sind die deutschen Exporte gegenüber März 2026 kalender- und saisonbereinigt um 0,9 Prozent und die Importe um 1,2 Prozent gestiegen. (Bild: Destatis)")
:quality(80)/p7i.vogel.de/wcms/76/32/763233e84c4054d0c8634dad6c6141fc/adobestock-2035398302-2730x1536v1.jpeg "Wir zeigen, wie aus mechanischen Fächern und maritimen Lüftungssystemen der moderne Hochleistungsventilator wurde. (Bild: © Olga Ко – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/09/2a/092ad24dd4b603abc12e017024d5be85/digitalerzwillingjoseph-von-fraunhofer-20-282-29-6200x3489v1.jpeg "Auf der Hannover Messe 2026 konnten sich Besucher mit dem digitalen Zwilling von Joseph von Fraunhofer unterhalten – das Metaverse und KI machen es möglich. (Bild: Fraunhofer-Gesellschaft)")
:quality(80)/p7i.vogel.de/wcms/2f/2b/2f2b46d8cd0987790d053a0ecc434833/aumovio-pp-dtco-1-1772x997v1.jpeg "20 Jahre digitaler Tachograph: Wie sich das Gerät vom Kontrollgerät zum Datenhub im Güterverkehr entwickelt hat. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/bf/45/bf4523ff21e3add62ccd8390c5bfea7a/adobestock-726557427--c2-a9-20vladan-20-e2-80-93-20stock-adobe-com-ki-generiert-3580x2016v1.jpeg "Astronomie erforscht die Welt der Galaxien und versucht, Entstehung, Aufbau und Entwicklung des Universums zu erklären. (Bild: © Vladan – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/a5/85/a585fd3e9719eb236ee815591f370261/ergonomischer-montagearbeitsplatz-gesuender-und-effizienter-arbeitenv1.jpeg "Ein ergonomisch eingerichteter Montagearbeitsplatz unterstützt effiziente Arbeitsabläufe und reduziert körperliche Belastungen. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/57/77/5777fa6040a24e6a62e9b06a5ba3196b/itemde-vogel-advertorial-mobile-roboter-in-der-industrie-headerbildv1.jpeg "Mit standardisierten Base Carts und individuell konfigurierbaren Top Modulen bietet item passgenaue Lösungen für unterschiedliche Transportaufgaben (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/50/8c/508ccaa2f4a61a0fecf84fde16ba45aa/schrittmotor-nema-24-erklaerung-und-anwendungen-die-sie-kennen-solltenv1.jpeg "Die Parametrierung und Inbetriebnahme des Integrierten Motors ST NEMA24 von item Industrietechnik erfolgen komfortabel mit der Software item MotionSoftStepper (Bild: item)")
Konstruktion Elastische Verformung von Radkörpern berechnen
Die neue Version der Mesys Wellensystemberechnung erlaubt nun auch die Kopplung der Verformung von Oberflächen für Verzahnungen und Wälzlager. Die Verformung eines Gehäuses führt dann zu Verformungen von Lagerringen und von Radkörpern von Zahnrädern.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/86700/86798/65.png "logo.png ()")
Verzahnungskräfte führen zu Verformungen von Radkörpern. Das wiederum beeinflusst die Lastverteilung auf der Flankenlinie, wenn der Radkörper nicht gleichmäßig verformt wird. Das Beispiel einer einfachen Welle zeigt im Folgenden den Einfluss der Radkörperverformungen auf die Linienlastverteilung von Stirnrädern.

Das Berechnungsbeispiel ist eine Welle mit zwei starren Stützen, einmal mit zentrischem Zahnrad und einmal mit einem Versatz für das Zahnrad.

In ISO 6336-1 Abschnitt 7.4.3.2 wird vorgeschlagen, den mittleren Durchmesser von Kopf- und Fußkreis für die Berechnung der Biegeverformungen zu verwenden und den Fußkreisdurchmesser plus 0.4*Modul für Torsionsverformungen. Hier wird ein gerundeter Wert von 48 mm dazwischen verwendet (z = 25, mn = 2). In Abschnitt 7.4.3.3 gibt die Norm noch an, dass für die Versteifung der Welle durch Verzahnungen oder Verbindungen mit Pressitz ein mittlerer Durchmesser von Bohrungsdurchmesser und Nabendurchmesser verwendet werden kann. Dieser mittlere Durchmesser sollte nur für die Versteifung der Welle verwendet werden und nicht für die elastische Verformung von Radkörpern.
Die folgen Fälle werden betrachtet:
- Berechnung mit Balkenmodell: Der Wellendurchmesser im Bereich der Verzahnung wird auf einen Durchmesser zwischen Fuß- und Kopfkreis erhöht.
- Berechnung mit Balkenmodell: Der Wellendurchmesser wird auf den Mittelwert von (20 + 48)/2 = 34 mm erhöht.
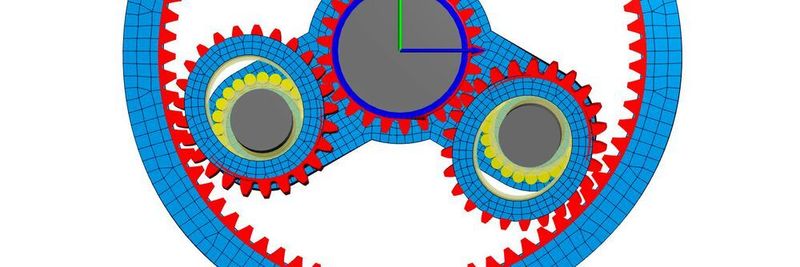
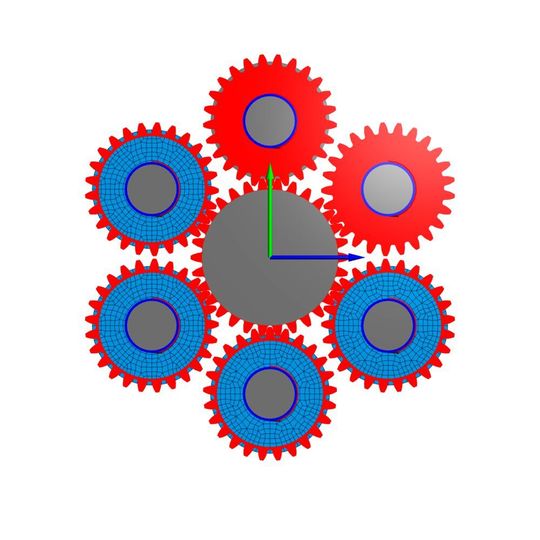
- Unsymmetrischer 3D-elastischer Radkörper mit Steg links
- 3D-elastischer Vollzylinder als Radkörper
- 3D-elastischer Radkörper mit Steg in der Mitte
Für die Berechnung der Verformungen der Verzahnungen sind die Zahnräder im Eingriff mit einem zweiten starr gelagertem Zentralrad. Alle Beispielwellen sind mit dem Zentralrad im Eingriff und werden mit dem gleichen Drehmoment von der linken Seite belastet.
Die Resultate werden für das zentrische Zahnrad und für den Fall mit Versatz in folgenden Übersichten angegeben:


Die maximale Wellendurchbiegung wird jeweils für die innere Welle angegeben. Das Verhältnis wmax/wavg ist ähnlich dem Breitenlastfaktor des Radpaares, allerdings sind nur lastabhängige Effekte berücksichtigt und kein Einfluss von Toleranzen. Zusätzliche Herstelltoleranzen oder Nachgiebigkeiten der Lager würden zu grösseren Breitenlastfaktoren führen.
Fall 1 und 4 verwenden beide einen Vollzylinder als Radkörper. Die Wellendurchbiegung im Fall 4 ist grösser als bei Fall 1, allerdings sind die Flankenlinienverformungen in Fall 4 kleiner als bei Fall 1. Der Grund ist, dass sich die Welle im Radkörper verformen kann. Allgemein ist ein Balkenmodell zu steif im Fall von Querschnittsänderungen. Das 3D-Volumenmodell berücksichtigt die Spannungsverteilung automatisch an der Stelle von Querschnittsveränderungen, ohne dass versteifende Durchmesser oder Kegelwinkel geschätzt werden müssen.
Fall 2 mit einem mittleren Durchmesser für den Radkörper ist nicht sinnvoll für die Berechnung von Flankenliniendeformationen, wie der Vergleich mit Fall 4 und 5 zeigt. Bei einem Pressverband zwischen Welle und Radkörper wird die Welle weniger stark versteift, wie auch in Fall 5, wo keine Versteifung erfolgt. Trotzdem ergibt sich in Fall 5 eine sehr kleine Verformung der Flankenlinie. Das Berechnungsmodell mit dem mittleren Durchmesser ist nur sinnvoll, wenn die Biegelinie der Welle das Ziel der Berechnung ist. Die Durchbiegung in Fall 2 nähert sich auch Fall 4 an, während das für die Flankenlinienverformungen nicht der Fall ist.
Im Vergleich von Fall 4 und 5 erkennt man in der Lastverteilung den kleinen Einfluss des Torsionsmomentes. Während in Fall 4 mit dem Vollzylinder das Drehmoment von links wirkt, geben bei Stegrad die Außenseiten durch Torsion und Biegung etwas nach. Das wirkt wie eine kleine Balligkeit.
:quality(80)/images.vogel.de/vogelonline/bdb/1384200/1384202/original.jpg "Als einfaches Beispiel zunächst ein Rillenkugellager in einem quadratischen Block, der an der Unterseite starr eingespannt ist. Das Lager wird horizontal belastet. (Mesys)")
Berechnung
Wie die elastische Gehäusedeformationen die Lastverteilung im Wälzlager beeinflusst
Der Fall 3 zeigt eine grosse Flankenlinienabweichung durch das Verkippen. Der Hauptgrund ist hier nicht die Verformung des Radkörpers selbst, sondern die Kopplung an der Welle an einer Stelle mit großem Neigungswinkel. Der Neigungswinkel der Welle und die Verformung des Radkörpers tragen beide zu den gesamten Flankenlinienabweichungen bei, während bei den anderen Fällen ein kleiner Neigungswinkel der Welle wirksam wird.
Mit einem detaillierterem Berechnungsmodell für den Radkörper können bessere Resultate sowohl für die Berechnung der Biegelinie der Welle als auch für die Flankenlinienabweichungen von Verzahnungen erzielt werden. Im Fall einer Berechnung mit einfachen Balkenelementen, sollte der Außendurchmesser des Radkörpers für die Berechnung von Flankenliniendeformationen verwendet werden. Für die Berechnung der Biegelinie der Welle kann dagegen ein kleinerer Durchmesser für den Radkörper verwendet werden, der besser zur Wellensteifigkeit passt.
Nach einer einmaligen statischen Reduktion des Radkörpers, die hier etwa 1 min dauert, benötigt die Berechnung nur Sekunden, wie für eine Berechnung mit Balkenelementen. Der einzige Nachteil der 3D-elastischen Bauteile ist eine Vergrößerung der gespeicherten Berechnungsdateien.
In diesen Beispielen wurden keine Verzahnungskorrekturen verwendet, um den Effekt der Verformungen auf die Linienlastverteilungen zu zeigen. Selbstverständlich lässt sich die Berechnung auch mit Verzahnungskorrekturen durchführen. (ud)
* Markus Raabe, Mesys AG, Zürich.
(ID:45423938)
:quality(80)/p7i.vogel.de/wcms/0a/17/0a17a13a78297173a9eef6f73efc5677/0127356572v1.jpeg "Im Fokus: die neue Version der FVA-Workbench (im Bild) und optimierte Lösungen von Kisssoft und GWJ Technology. (Bild: FVA)")
:quality(80)/p7i.vogel.de/wcms/3c/22/3c226896f02d7b4d5af70f4a20f0b5dc/0125814744v1.jpeg "Dieser Leitfaden soll Konstrukteure dabei unterstützen, Simulationsergebnisse nicht nur als „bunte Bilder“, sondern als wertvolle Entscheidungsgrundlage zu nutzen. (Bild: © poco_bw - stock.adobe.com)")