:quality(80)/p7i.vogel.de/wcms/ed/36/ed364d487554f456228987076508fccd/contact-software-launcht-fourier-20aiv1.png "Fourier AI kombiniert KI-Modelle mit KI-Anwendungen, die für anspruchsvolle Engineering-Aufgaben entwickelt wurden. (Bild: Contact Software)")
:quality(80)/p7i.vogel.de/wcms/09/b0/09b0326b075ec363d8f786eeb57885d2/26-02-pi-fraunhofer-iws-41300-ultragrain-project-closing-pic-02-1562x878v1.png "In Hochgeschwindigkeit zeigt sich der Prozess des Laser-Draht-Auftragschweißens (DED-LB) mit pulslaser-induziertem Plasma, der zum Projekterfolg von Ultra Grain beitrug. (Bild: Fraunhofer IWS)")
:quality(80)/p7i.vogel.de/wcms/ee/1c/ee1cb90cd415a6588eda6968d1c0f232/laeufer-adobestock-1830251820-jianjian-mit-ki-5800x3265v1.jpeg "Das Fraunhofer IAO ruft im Rahmen der XR Expo 2026 in Stuttgart zur ersten Europäischen Avatar Challenge auf.
(Bild: 830251820_jianjian / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/f8/75/f87533a0a7520a6762f43fdd3be9ad50/0130030998v1.jpeg "Stephan Finkel von 3DSE Management Consultants spricht auf dem European Defence Supply über die Lieferkette im Rüstungssektor. (Bild: 3DSE)")
:quality(80)/p7i.vogel.de/wcms/88/04/880449ed982410d6b5ac58266082ddf1/elchinator-security-5042249-1280-1280x720v1.jpeg "Der HP Wolf Security Report zeigt: Angreifer nutzen KI für Geschwindigkeit, Modularität und Automatisierung, Qualität der Kampagnen ist dabei gering. (Bild: Pixabay)")
:quality(80)/p7i.vogel.de/wcms/16/2c/162c5c67720129cb55a53caaaceb9015/adobestock-1266426589--c2-a9-20anak-20-e2-80-93-20stock-adobe-com-ki-generiert-5760x3238v1.jpeg "Manufacturing-X ist ein Konzept für einen gemeinsamen, föderierten „Datenraum Produktion“, in dem Unternehmen der Fertigungsindustrie standardisiert Produktions‑ und Maschinendaten austauschen können. (Bild: anak – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/4f/aa/4faad7c14657ac9dc2982110dc4f1805/hm26-533x300v1.jpeg "Eine unabhängige Jury hat unter der Leitung von Prof. Dr.-Ing. Holger Hanselka, Präsident der Fraunhofer-Gesellschaft, unter den zahlreichen Einreichungen drei Unternehmen für den Hermes Award nominiert: Festo, Schaeffler und Ziehl-Abegg (Auflistung in alphabetischer Reihenfolge). (Bild: Deutsche Messe)")
:quality(80)/p7i.vogel.de/wcms/36/d4/36d4ccf25ec5149ac24710536a941692/laurentschmidt-drone-3419851-5760x3238v1.jpeg "Vielseitig einsetzbar: Drohnen kommen heute in zahlreichen Applikationen zum Einsatz, von der Inspektion etwa von Windrädern bis hin zur Überwachung von Einrichtungen. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/6e/5a/6e5a09bb37923f3c1a4b0860ccc367d5/newsimage418174-1536x864v1.jpeg "Der kleinste QR-Code der Welt ist nur im Elektronenmikroskop sichtbar, das aber sehr stabil. (Bild: TU Wien)")
:quality(80)/p7i.vogel.de/wcms/ce/43/ce43f56a7f4153787a5342a1137138f8/euchner-vb-logimat-01-6000x3373v1.jpeg "Das modulare Schutztürsystem MGB2 Modular kombiniert mit dem Schlüsselsystem CKS erfüllt alle Anforderungen an Flexibilität, Kosteneffizienz und Betriebssicherheit. (Bild: Euchner)")
:quality(80)/p7i.vogel.de/wcms/39/72/3972da2193f610a42556bfea713d7f8c/scalable-security-6000x3375v1.jpeg "Profinet bietet eine skalierbare Security Lösung und kann damit bedarfsgerecht angewandt werden. (Bild: iuriimotov / stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/24/ff/24ffb30cc73586141c712ef61e6f9454/bild-202-slo-anwendungsbild-2950x1661v1.jpeg "Trotz seiner kompakten Bauform von nur 30 × 30 × 135 mm bietet der SLO eine Zuhaltekraft von 3.000 N und Schutzart IP69. (Bild: Bernstein)")
:quality(80)/p7i.vogel.de/wcms/cf/68/cf68a065f389ef22266950d7e4c394fc/newsimage418893-1920x1079v1.jpeg "Bürokratieindex 2026: Prozentuale Änderung der Bundesgesetze. (Bild: ESMT Berlin)")
:quality(80)/p7i.vogel.de/wcms/1e/23/1e2304de29986b6706547c6c997e6ace/business-9804075-1280-20-281-29-1280x720v1.jpeg "Im vierten Quartal 2025 gab es bundesweit 1,26 Millionen offene Stellen – 224.100 oder rund 22 Prozent mehr als im Vorquartal. (Bild: Pixabay)")
:quality(80)/p7i.vogel.de/wcms/2f/e2/2fe2b07d9a68db267ebe385f10f275b8/newsimage418860-1814x1021v1.jpeg "Differenz aus dem Anteil der KMU, deren Umsatz, Gewinn und Investitionen in den vergangenen 3 Monaten gestiegen oder gesunken ist. (Bild: IfM Bonn)")
:quality(80)/p7i.vogel.de/wcms/7a/b7/7ab71ff0f46ee6f0cca611ea898e403a/0129560848v1.jpeg "(Bild: Vogel Professional Education)")
:quality(80)/p7i.vogel.de/wcms/bc/49/bc4957f73a884d8ee1356914659cf2f4/adobestock-325234002--c2-a9-20karyna-20-e2-80-93-20stock-adobe-com-5490x3087v1.jpeg "Riesenräder sind mehr als eine Attraktion, sie sind ein Symbol für technologischen Fortschritt. (Bild: © Karyna – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/7a/22/7a22898e1ee01157399158bd2d7f26c6/0128676654v2.jpeg "Fahrradbeleuchtung gibt es seit dem 19. Jahrhundert. Was als Ölfunzel begann, ist heute ein präzise geregeltes System, das Licht effizient formt. (Bild: www.vaude.com | pd-f)")
:quality(80)/p7i.vogel.de/wcms/46/c9/46c97200605642d8b8f9bc9ac014316a/0128359318v2.jpeg "Kein Weihnachtswunder, aber dennoch faszinierend: Die wunderschönen, auch heute noch oft handgefertigten Weihnachtspyramiden drehen sich dank Luftauftrieb. (Bild: © Animaflora PicsStock - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/79/16/7916e9b7731fb39679d596d16f918a8f/0127591377v1.jpeg "Wo heute in Köln die Hohenzollernbrücke über den Rhein führt, demonstrierte Christian Hülsmeyer 1904 zum ersten Mal sein Telemobiloskop zur Messung der Entfernung von Schiffen. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/0b/c3/0bc3f807a69dbb07898026e24c11ea06/mini-environments-optikfertigung-neuv1.jpeg "Mini-Environments auf Basis modularer item Komponenten: Dadurch verfügen Unternehmen in der Optikfertigung über präzise, flexible und reinraumtaugliche Arbeitsbereiche. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/e1/93/e193cd7df3b15859208fa33b610588ad/0127840781v1.jpeg "Markus Röß, Leitung Marketing und Vertrieb (Bild: Andreas Karl)")
:quality(80)/p7i.vogel.de/wcms/61/4f/614f0d08c8ea93498a6c6883d7701f25/0126917376v1.jpeg "Ergebnisse der Bitkom-Befragung. (Bild: Bitkom)")
Bionik Softes Greifen und koordiniertes Fliegen dank Indoor-GPS
Festo präsentiert mit dem Flex Shape Gripper und den Emotion-Butterflies aktuelle Forschungsträger aus dem Bionic Learning Network. Diese sind von natürlichen Prinzipien inspiriert und demonstrieren Möglichkeiten, diese auf die Automatisierung zu übertragen.
Anbieter zum Thema
:fill(fff,0)/p7i.vogel.de/companies/5d/92/5d92eae683273/lenord-bauer.jpg "Lenord_Bauer.jpg (Lenord, Bauer & Co. GmbH)")
Die Natur bietet eine Vielzahl von intelligenten Lösungen für technische Probleme, die durch kontinuierliche Weiterentwicklung optimiert wurden. Von diesen Prinzipien lassen sich die Entwickler des Bionic Learning Network inspirieren und übertragen sie auf Fragestellungen der Automatisierungstechnik. „Es gilt die komplexen Herausforderungen der Produktionsabläufe zu reduzieren und eine intuitive Steuerung der Maschinen und Anlagen zu gewährleisten“, so Dr.-Ing. Heinrich Frontzek, Leiter Corporate Communication und Future Concepts bei Festo. Als weltweiter Anbieter von pneumatischer und elektrischer Automatisierungstechnik gestaltet Festo die Produktions- und Arbeitswelten der Zukunft und bietet seinen Kunden innovative Lösungen für Produktionssysteme von morgen an. „Visionäre Ansätze hierzu liefern die aktuellen Projekte aus dem Bionic Learning Network von Festo“, betont Frontzek.
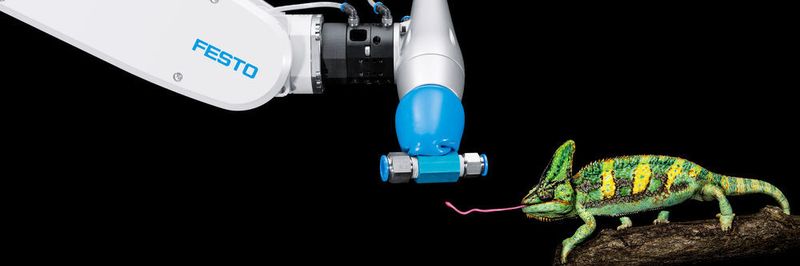
Flex-Shape-Gripper: Greifen nach dem Vorbild der Chamäleonzunge
Seit jeher spielen Greifanwendungen in der Produktion eine zentrale Rolle. Festo entwickelte bereits verschiedene Greifer – wie 2014 den Multi Choice Gripper, dessen adaptive Finger sich flexibel und sanft an die unterschiedlichsten Formen anpassen. Das Prinzip der Anpassung an das Greifgut setzt sich nun im Flex Shape Gripper fort. Dessen Wirkprinzip ist von der Zunge des Chamäleons abgeleitet. Das Chamäleon kann mit seiner Zungenspitze unterschiedlichste Insekten erbeuten. Die Zunge passt sich flexibel an das jeweilige Insekt an. Hat das Chamäleon seine Beute im Visier, lässt es seine Zunge wie ein Gummiband herausschnellen. Die Beute bleibt an ihr haften und wird wie an einer Angelschnur eingeholt.
:quality(80)/images.vogel.de/vogelonline/bdb/705600/705613/original.jpg "Mit den E-Motion-Spheres zeigt Festo, wie mehrere Objekte dank vielfältiger Vernetzung kollisionsfrei im dreidimensionalen Raum koordiniert werden. (Bild: Festo)")
Hannover Messe 2014
Festo präsentiert aktuelle Projekte aus dem Bionic Learning Network
Der Flex Shape Gripper kann mehrere Objekte mit unterschiedlichsten Formen in einem Vorgang greifen, sammeln und wieder abgeben – ohne, dass ein manueller Umbau notwendig ist. Möglich wird das durch seine wassergefüllte Silikonkappe, die sich flexibel und formschlüssig über das jeweilige Greifgut stülpt. Diese Anpassungsfähigkeit an verschiedene Formen verleiht dem Greifer seinen Namen. Sowohl der Halte- als auch der Ablösemechanismus sind pneumatisch gelöst. Für den Haltevorgang ist keine zusätzliche Energie notwendig. Zukünftig könnte der Flex Shape Gripper überall dort eingesetzt werden, wo mehrere Gegenstände mit unterschiedlichen Formen gleichzeitig gehandhabt werden, beispielsweise in der Servicerobotik, bei Montageaufgaben oder beim Handling von Kleinteilen. Das bionische Modell demonstriert Lösungsansätze für neuartige Greifertechnologien mit Hilfe von Pick and Place Vorgängen als auch die Flexibilisierung und Adaptivität von Produktionsanlagen. Derzeit ist Festo im Dialog mit interessierten Kunden, um die Marktrelevanz dieses Prototyps zu testen.
Emotion Butterflies: Ultraleichte Flugobjekte mit kollektivem Verhalten
Die ästhetisch wirkenden bionischen Schmetterlinge veranschaulichen ebenfalls komplexe Themen der zukünftigen Produktionswelt, wie Funktionsintegration, Ultraleichtbau und vor allem die vernetzte und in Echtzeit optimierte Kommunikation einzelner Systeme. Ein externes und gut vernetztes Leit- und Monitoringsystem koordiniert die einzelnen Flugobjekte autonom und sicher im dreidimensionalen Raum. Die eingesetzte Kommunikations- und Sensortechnologie bildet ein Indoor-GPS-System, das die Schmetterlinge kollisionsfrei und im Kollektiv steuert. Die Kombination aus integrierter Elektronik und ausgelagerter Kameratechnik mit einem Leitrechner ermöglicht Prozessstabilität. Um dem Flugverhalten ihres natürlichen Vorbilds so nahe wie möglich zu kommen, verfügen die künstlichen Schmetterlinge über eine integrierte Elektronik. Sie steuert die Flügel präzise und individuell an und setzt so die schnellen Bewegungen um.
Zur Steuerung der Emotion Butterflies ist kein menschlicher Pilot notwendig. Auf dem zentralen Rechner liegen vorprogrammierte Pfade, die den Schmetterlingen bei ihren Manövern die Flugbahnen vorgeben. Mithilfe von zusätzlich hinterlegten Verhaltensmustern können sie sich aber ebenso autonom durch den Raum bewegen. Mit den Emotion Butterflies und dem damit umgesetzten Indoor-GPS demonstriert Festo Aspekte der Automation der Zukunft wie die sichere und intuitive Mensch-Maschine-Interaktion oder das autonome und anpassungsfähige Verhalten von technischen Systemen, die jederzeit kontrollierte Eingriffe des Menschen zulassen und damit neue Perspektiven für den Arbeitsraum der Zukunft schaffen. (jup)
(ID:43724781)
:quality(80)/p7i.vogel.de/wcms/49/1c/491c30f333a952d60889835fd88a3556/0125144059v2.jpeg "Wie ISO-GPS und ASME gemeinsam zum Erfolg führen, lesen Sie hier. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/5a/fa/5afa60b5bfecfd8902945c6bafe8e9d3/0125202214v2.jpeg "Machine Learning (maschinelles Lernen) ist ein Teilbereich der künstlichen Intelligenz, mit dem Computersysteme befähigt sind, sowohl aus Daten als auch Erfahrungen zu lernen und sich eigenständig zu verbessern, (Bild: © WrightStudio - stock.adobe.com)")